Như mọi khi, tôi sẽ nói về việc cài đặt phiên bản ROS1 Noetic và phiên bản ROS2 Melodic trên Ubuntu 20.04 Focal (thực ra tôi đang dùng Mint 20.1 Ulyssa). Tất nhiên, có những người không cần những bài báo này, nhưng tôi thích đăng những bài báo như thế này vì nhiều lý do. Hãy nghĩ về nó như một loại máy cài đặt.^^ Đó là khái niệm của tôi ngày nay, và bài viết này cũng cho thấy quá trình với một video.
Ubuntu 20.04 Focal và Mint 20.1 Ulyssa giống hệt nhau ngoại trừ một số vấn đề.
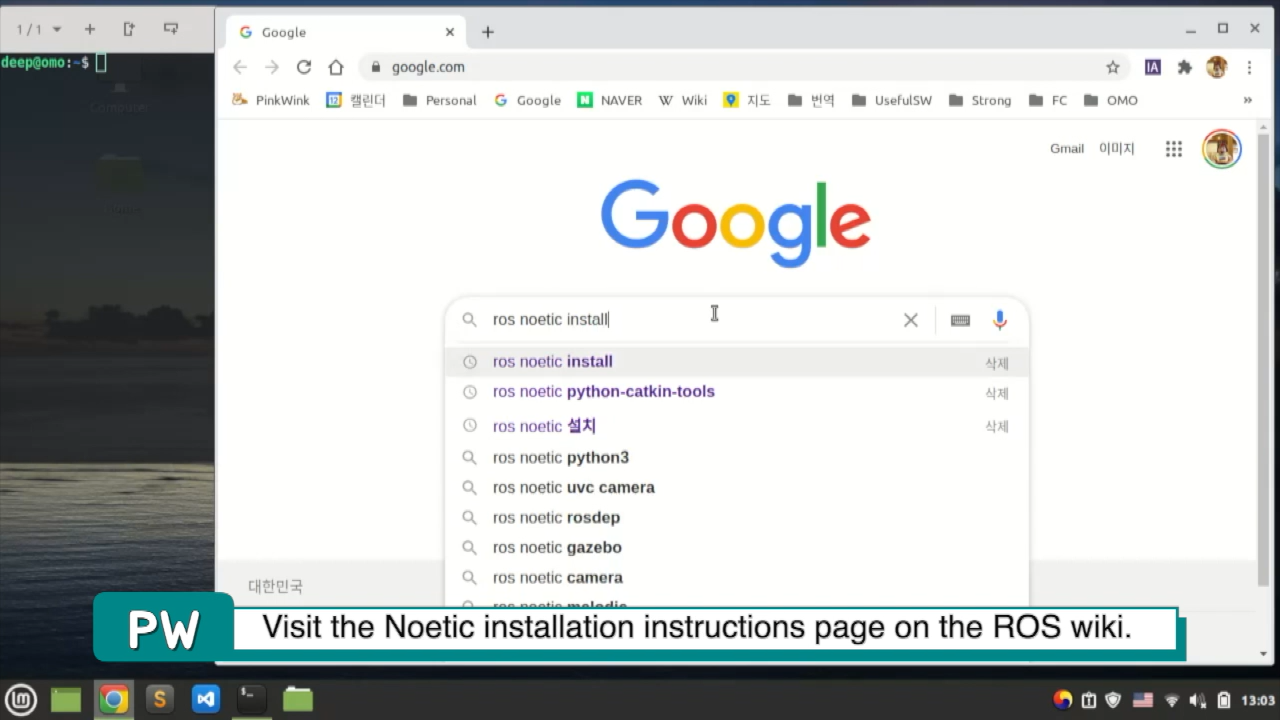
Đầu tiên bạn tìm trang cài đặt ROS1 Noetic trên Google.
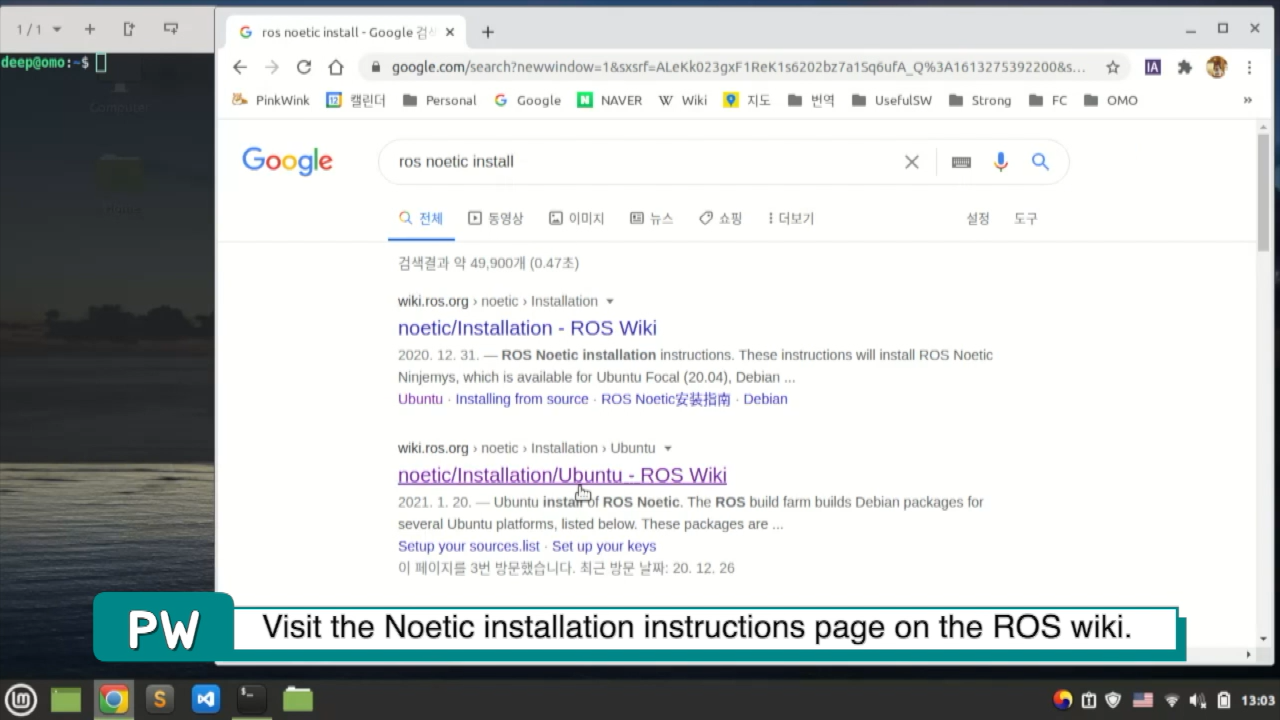
Bạn sẽ tìm thấy nó rất dễ dàng. Khi tôi luôn cài đặt, tôi thực hiện từ trang hướng dẫn cài đặt chính thức. Chà, đó là cách nhanh nhất để được thông báo về bất kỳ thay đổi nào có thể xảy ra.

Bạn có thể truy cập trang trên.
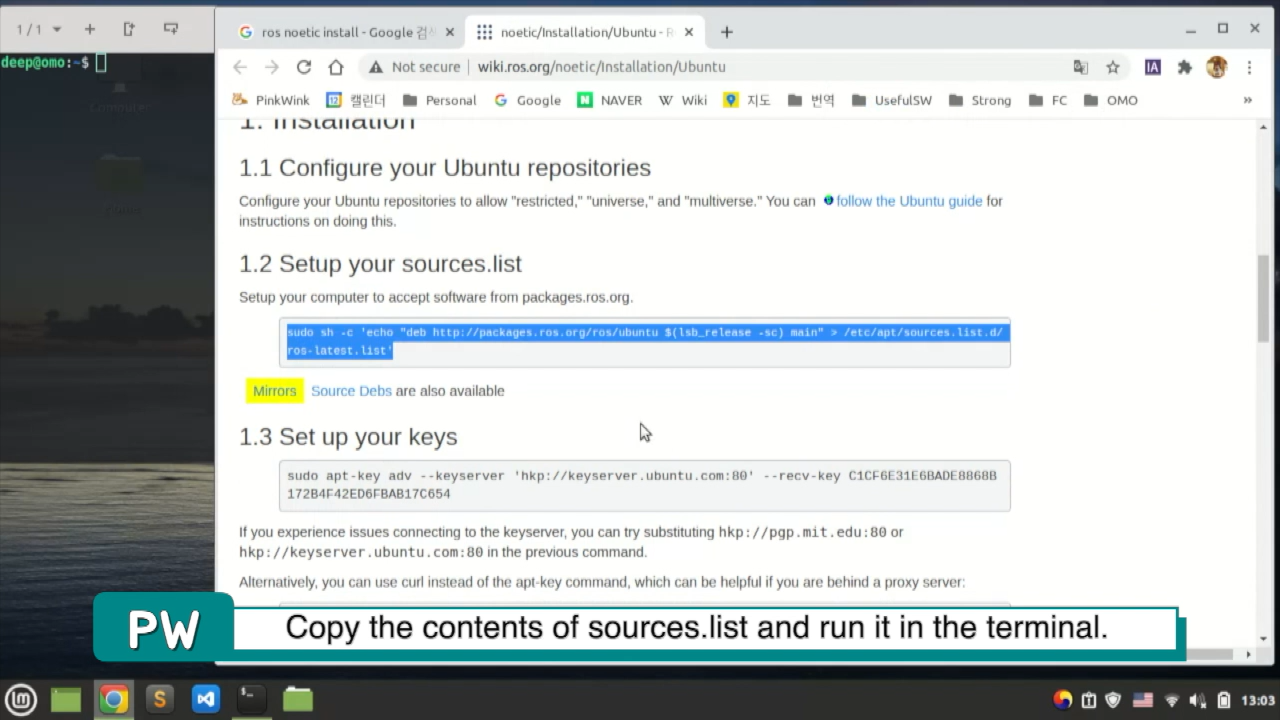
Điều đầu tiên cần làm là cạo nội dung của sources.list và dán nó vào thiết bị đầu cuối. Người dùng Ubuntu chỉ có thể dán mã đó vào,
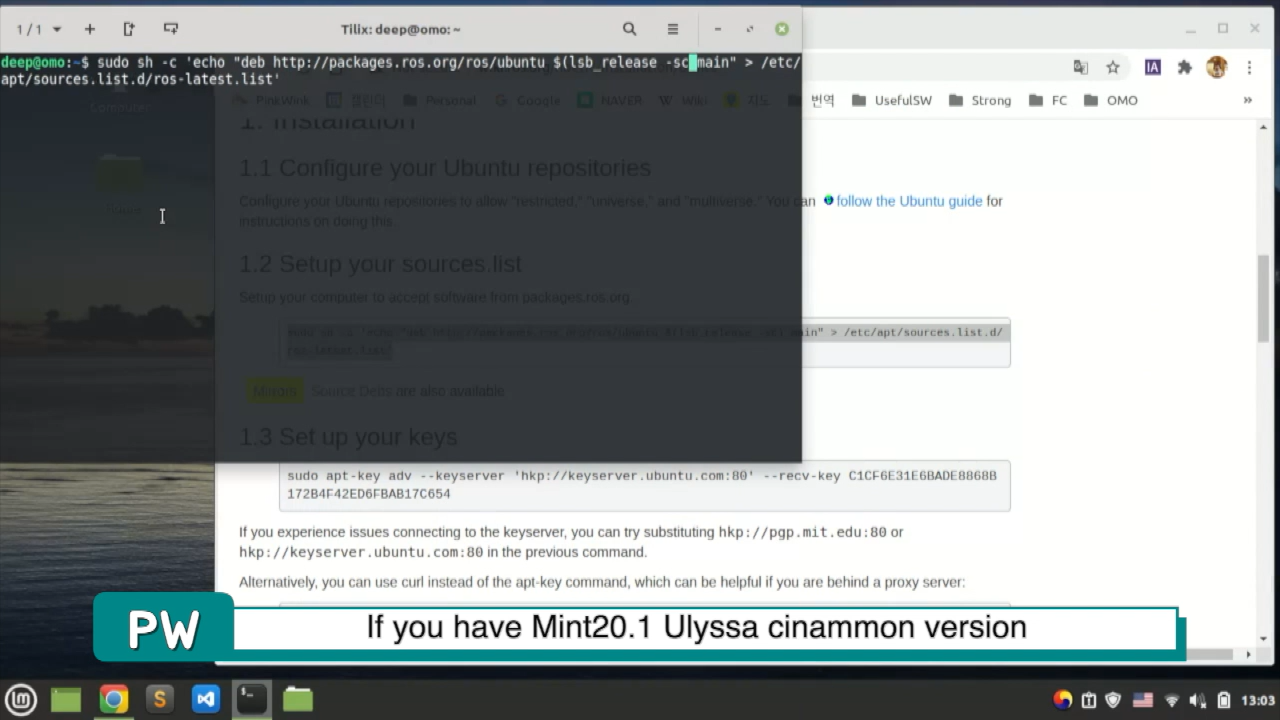
Người dùng Mint phải thay đổi mạnh mẽ $(lsb_release -sc) thành tiêu điểm.
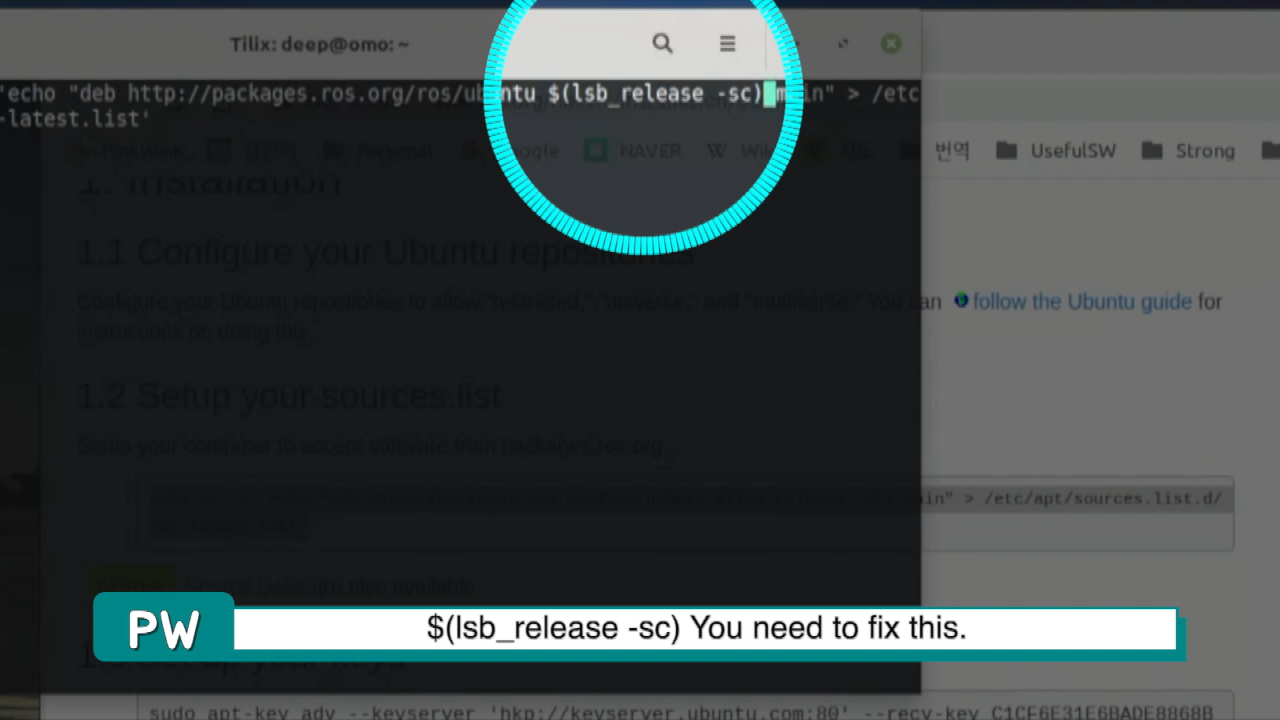
phần hiển thị ở trên
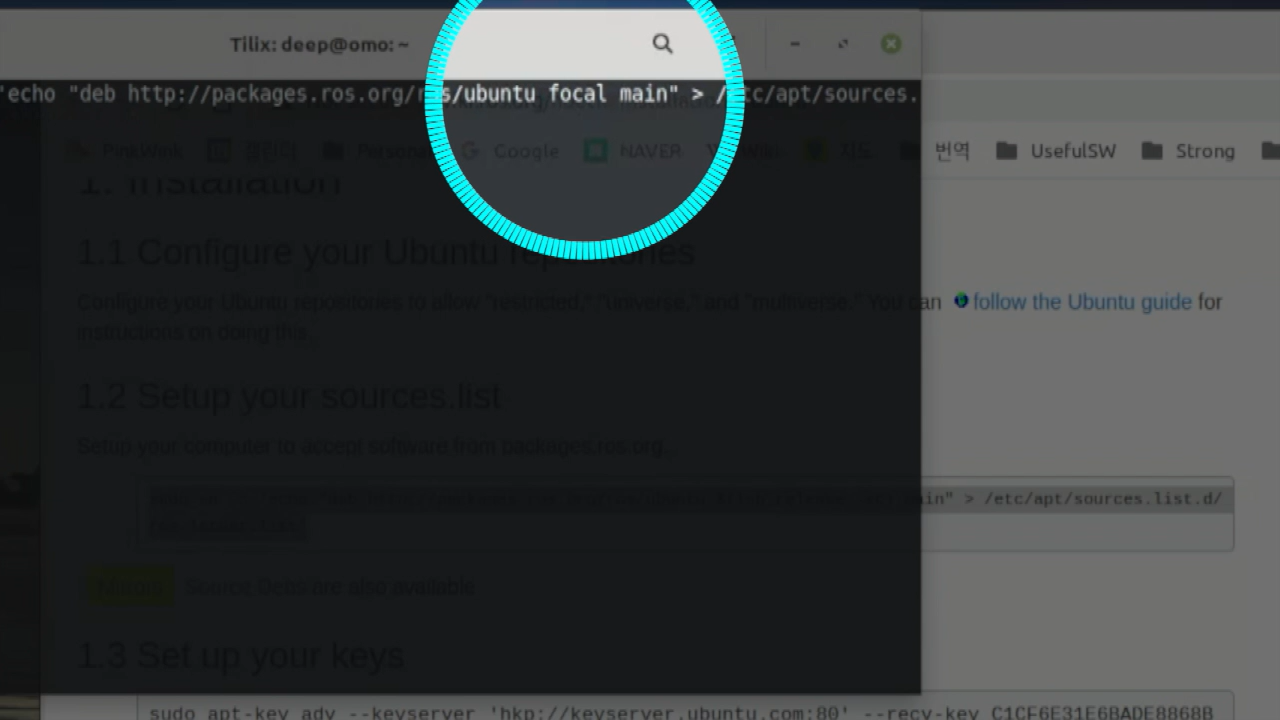
Thay đổi nó thành tiêu điểm.
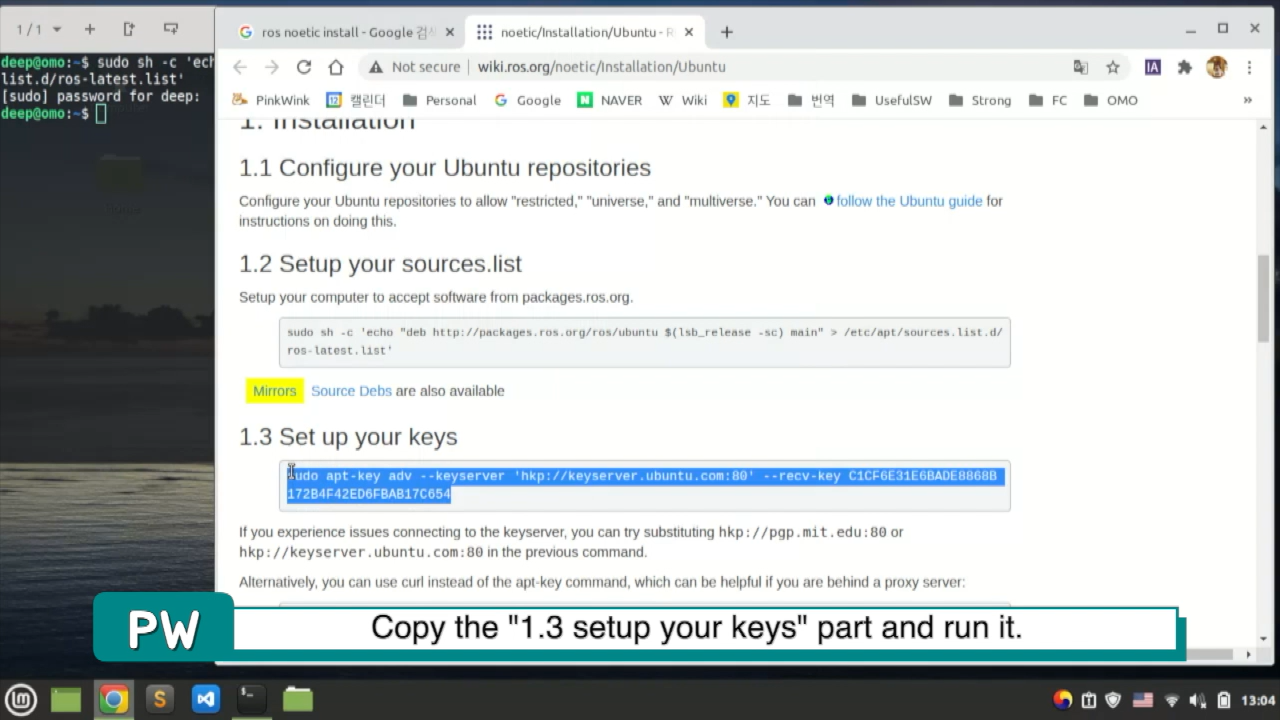
Và chạy phần phím thiết lập.
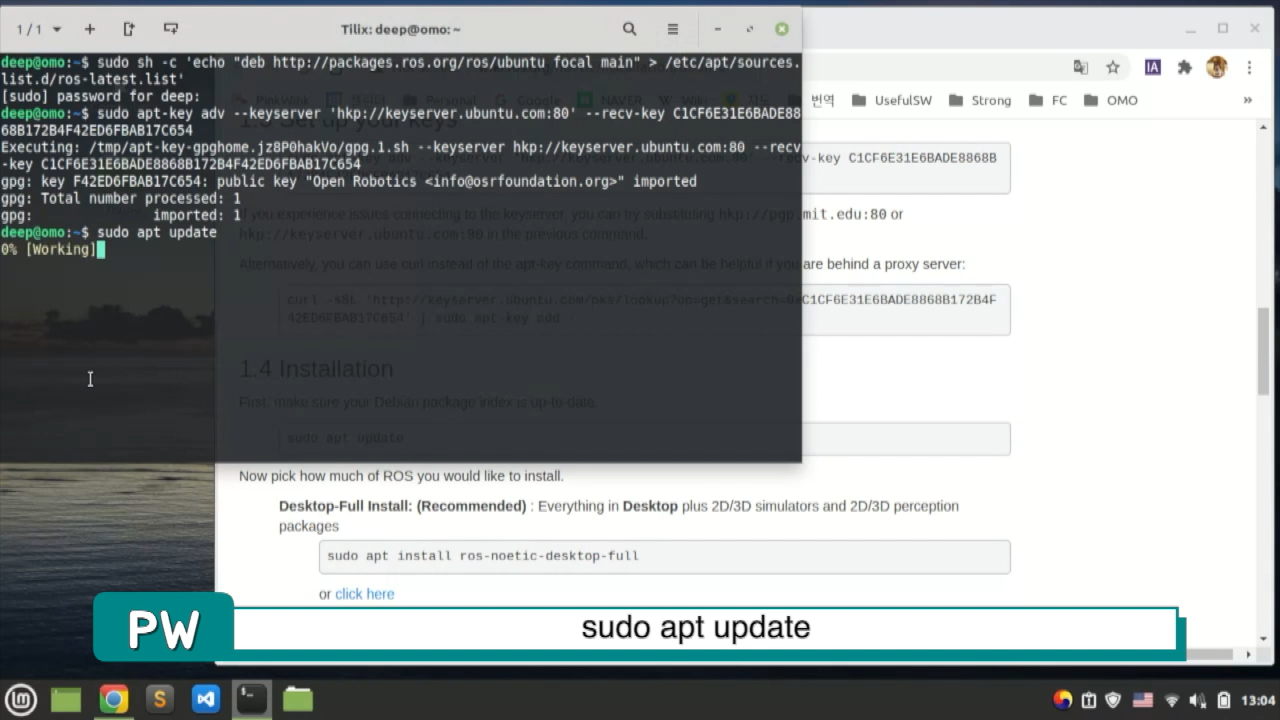
Thực hiện cập nhật Sudo apt và
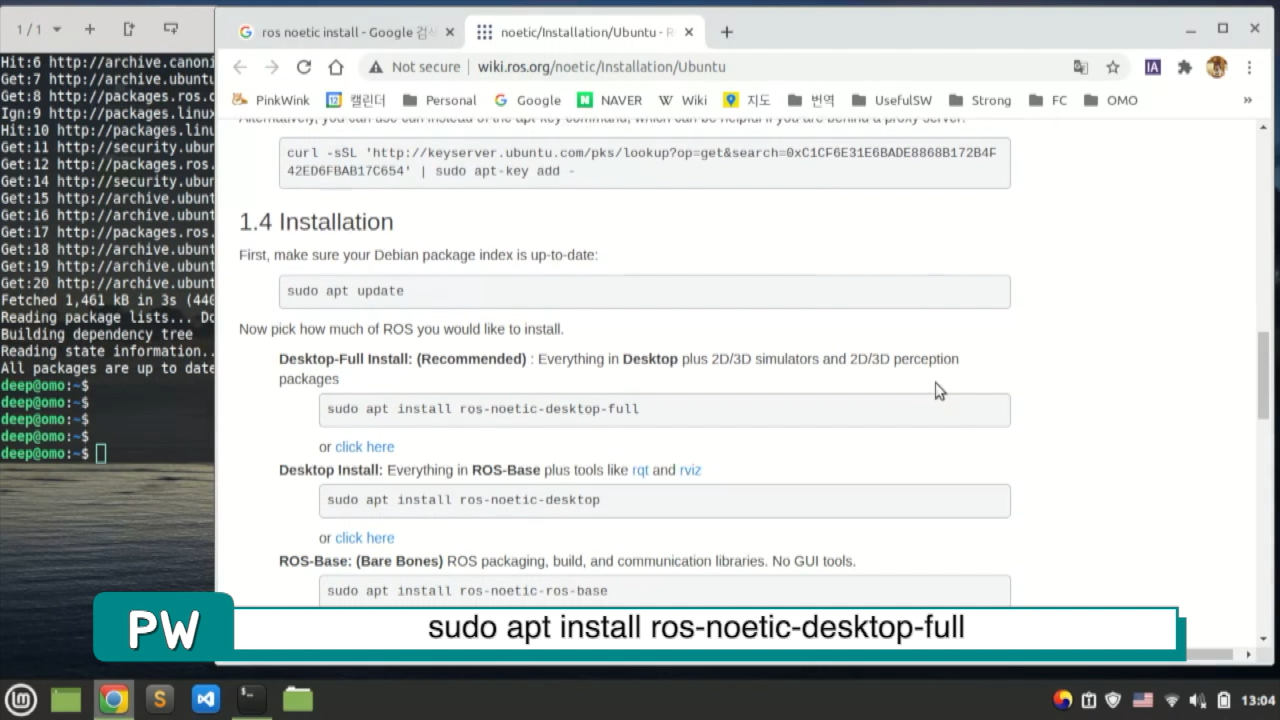
Cài đặt ros-melodic-noetid-desktop-full.
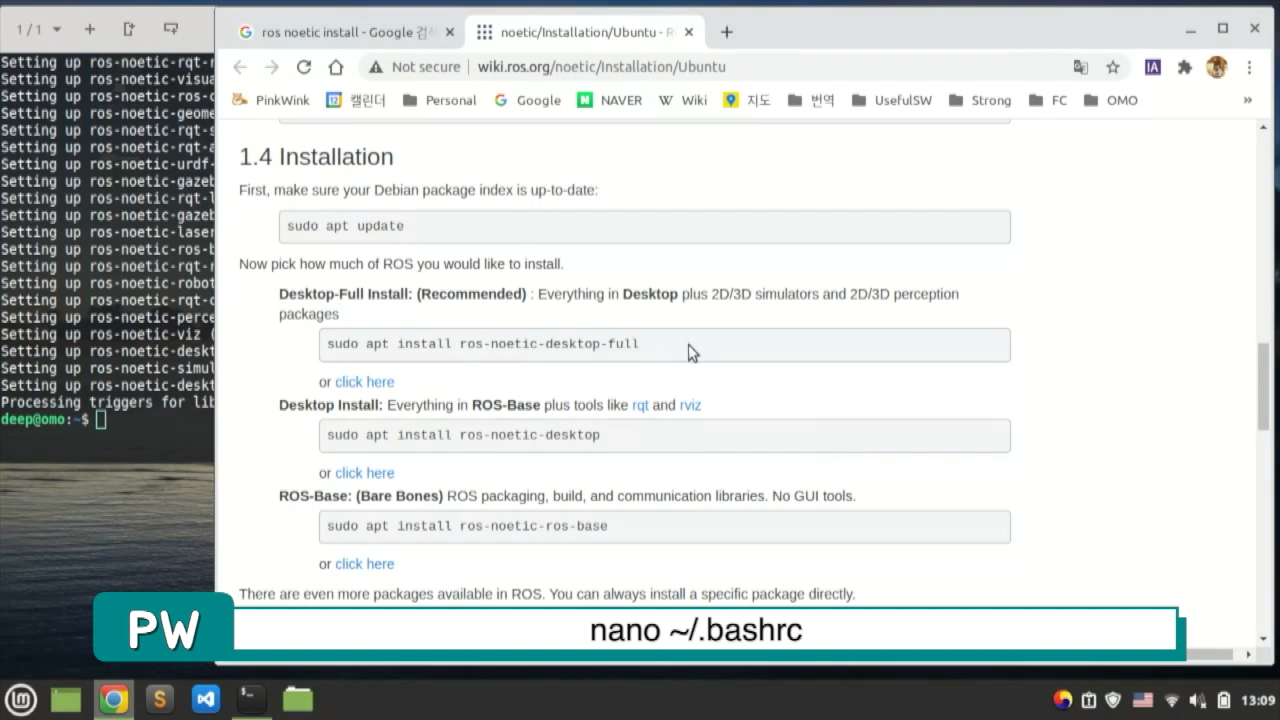
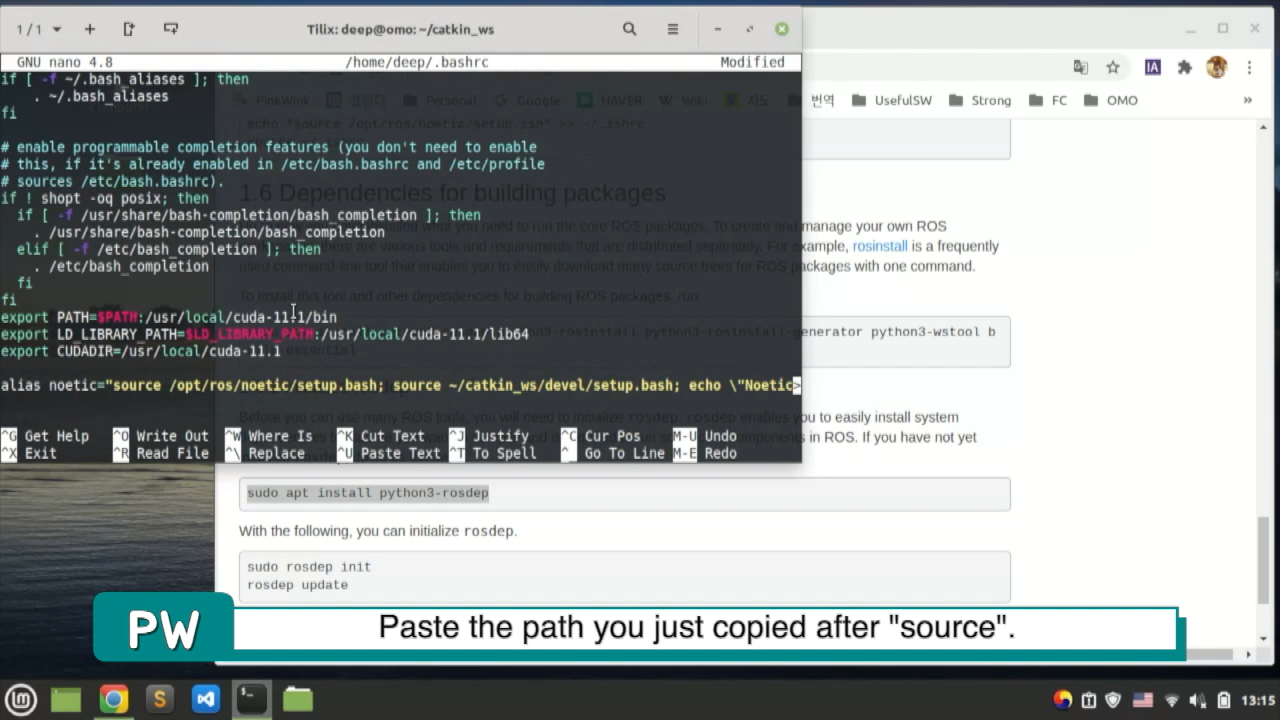
Và mở ~/.bashrc bằng nano.
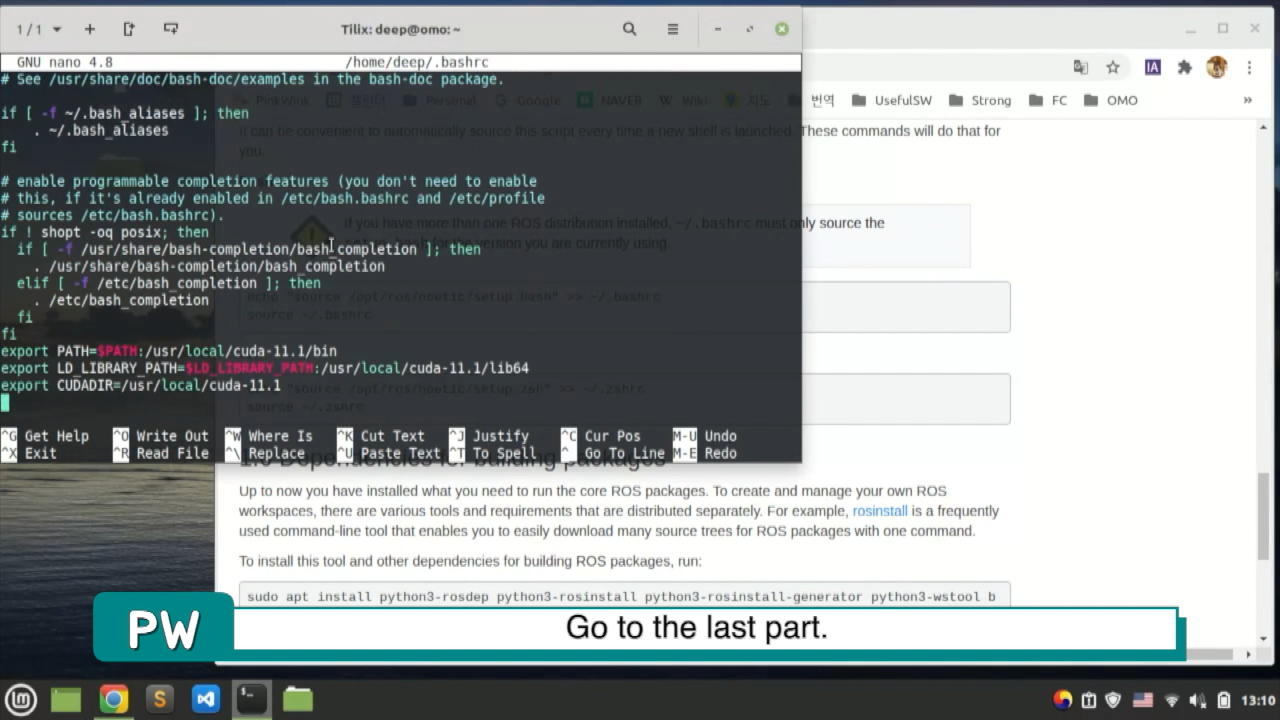
đi xuống cuối cùng
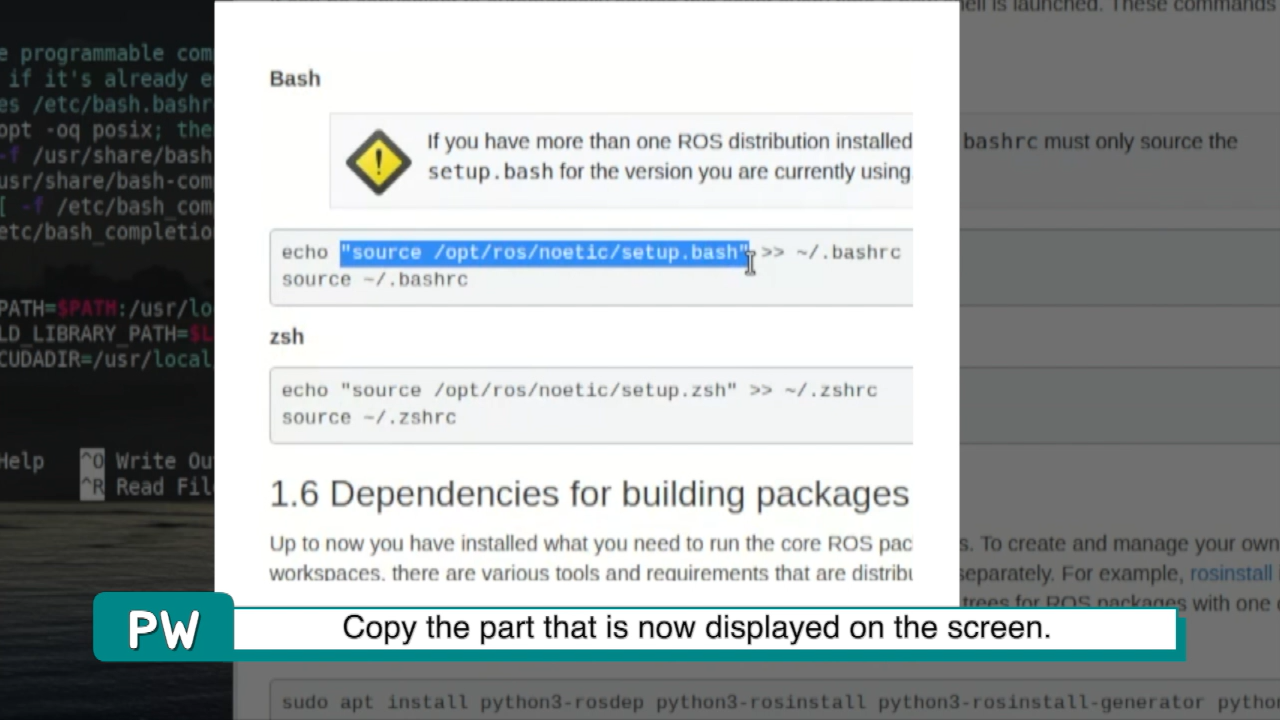
Sau khi cạo và sao chép phần đó trên trang cài đặt
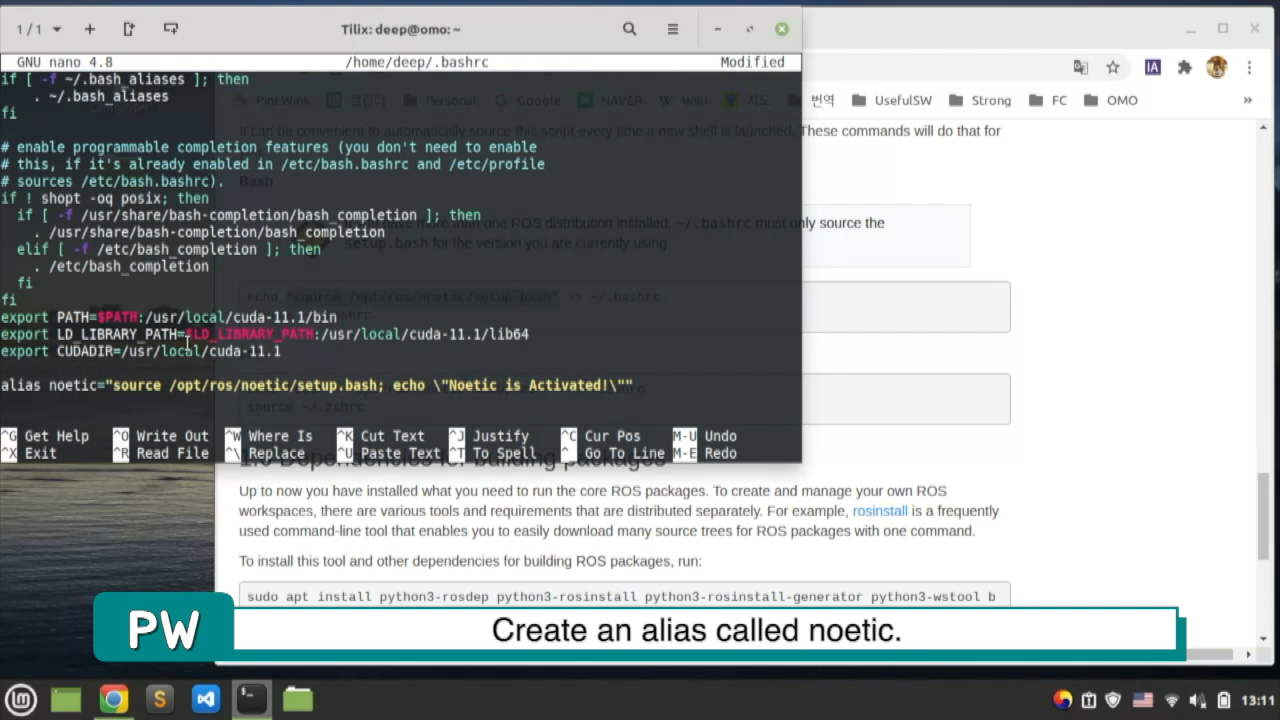
Tạo và dán thông báo bằng lệnh alias. Nhận xét hướng dẫn với lệnh echo phía sau nhé ^^
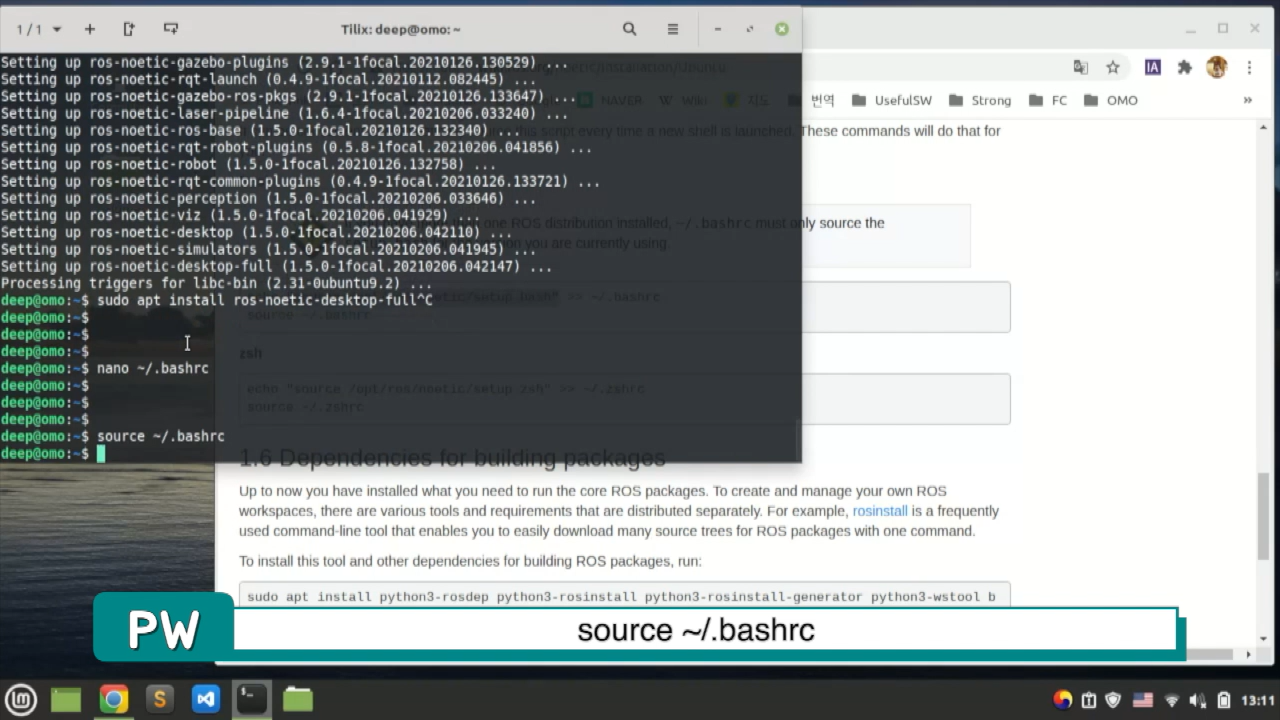
Đóng thiết bị đầu cuối và chạy lại hoặc đọc lại bashrc bằng lệnh nguồn.
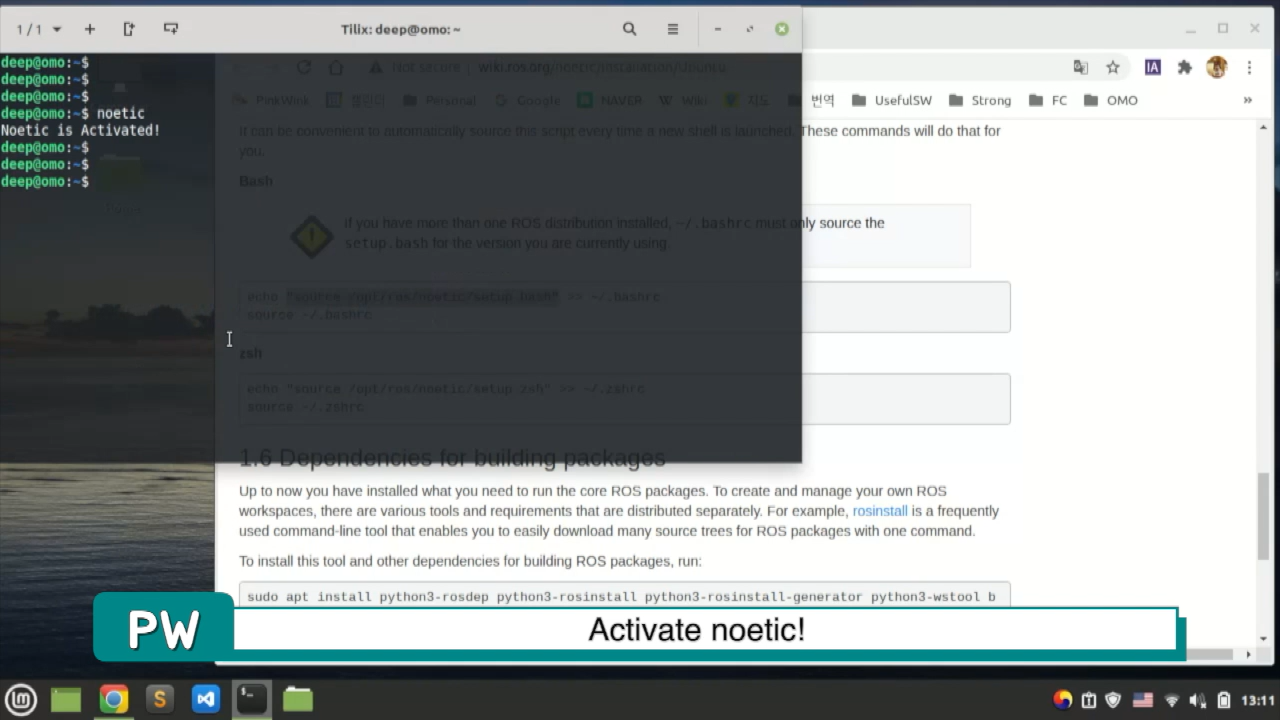
Và nếu bạn đưa ra lệnh noetic, nó sẽ được thực thi như bạn vừa viết.
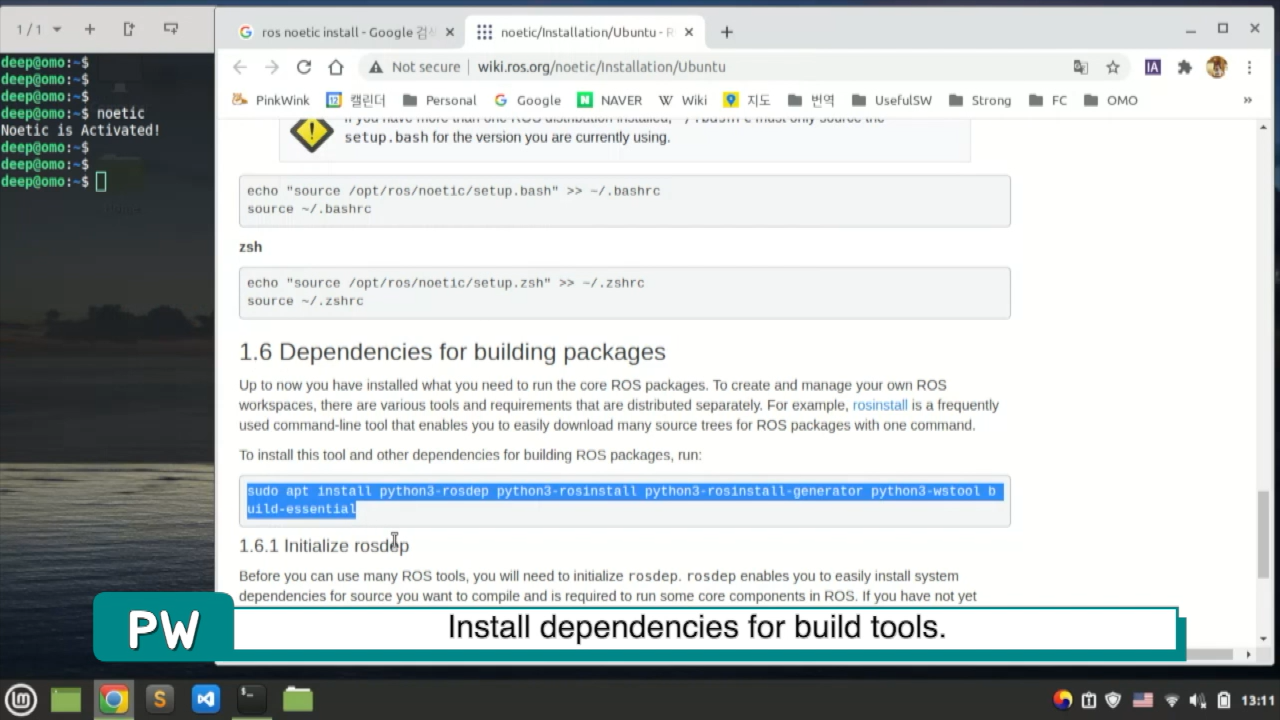
Bây giờ hãy cài đặt các phụ thuộc liên quan đến bản dựng để sử dụng trong ros1 noetic.
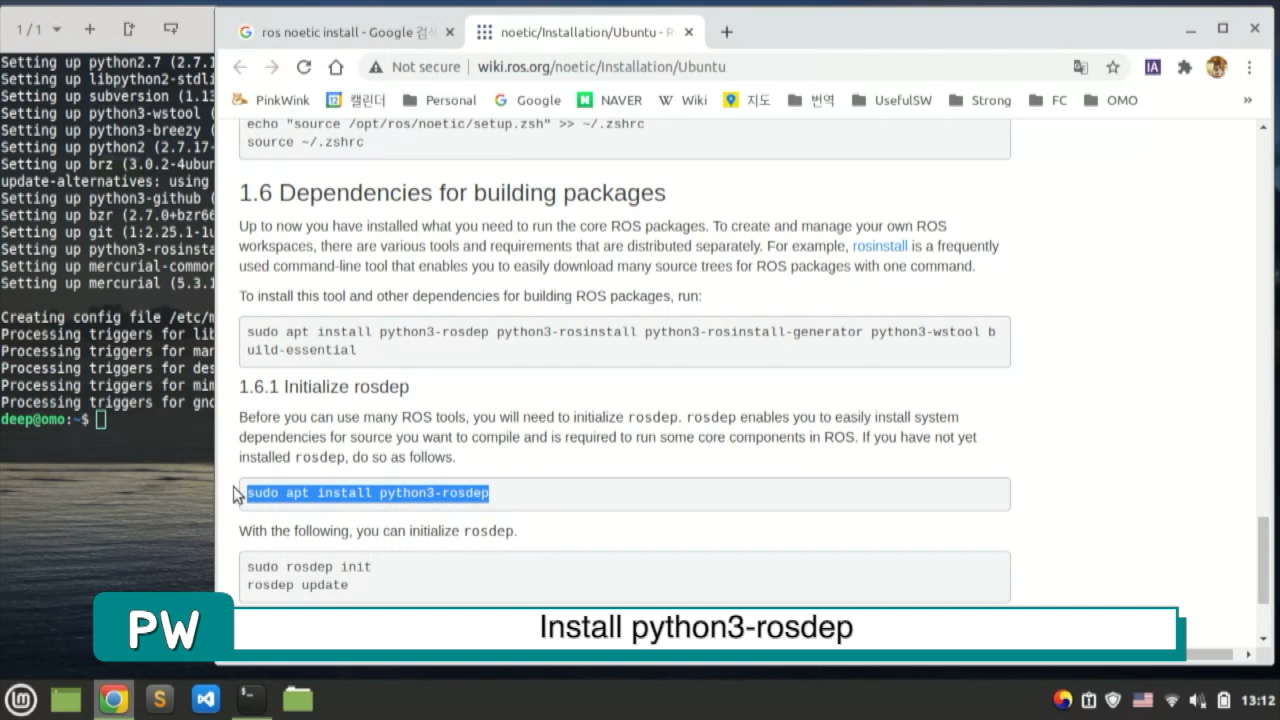
Và cài đặt rosdep.
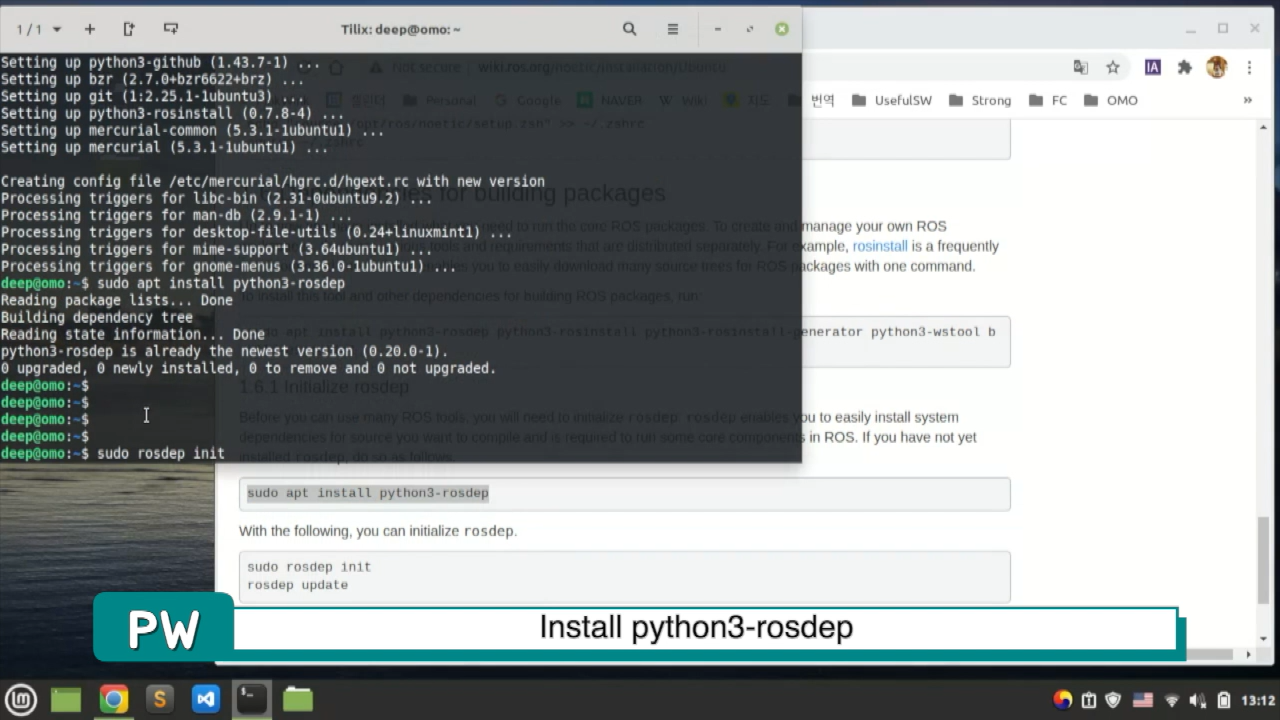
Và chạy rosdep init
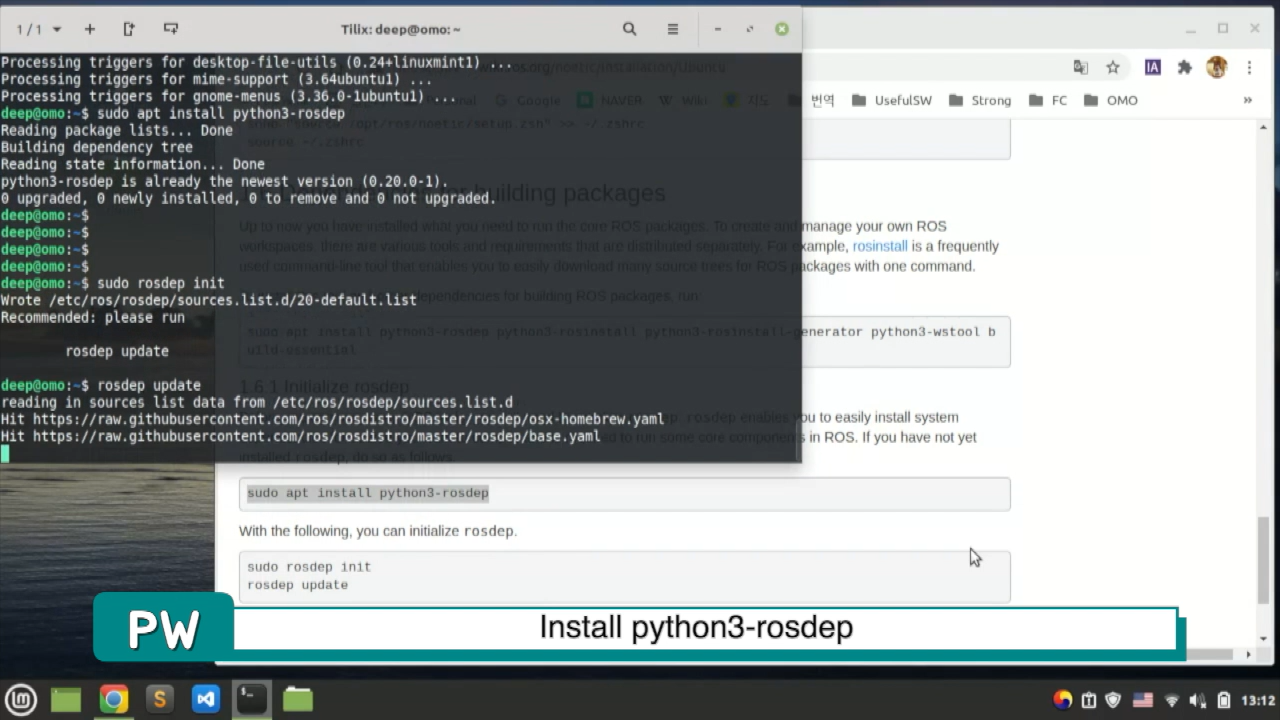
Nó thậm chí còn thực hiện cập nhật rosdep.
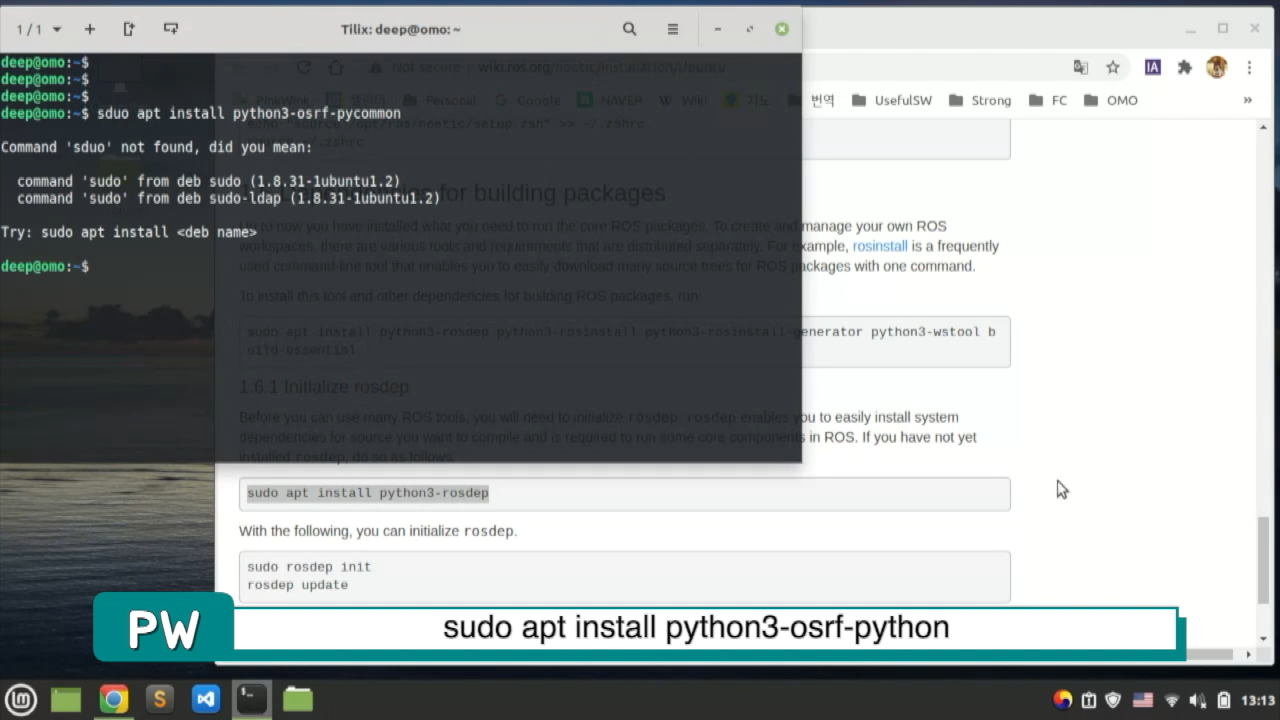
Bây giờ tôi cài đặt các công cụ catkin yêu thích của mình .

Đầu tiên cài đặt python3-osrf-python
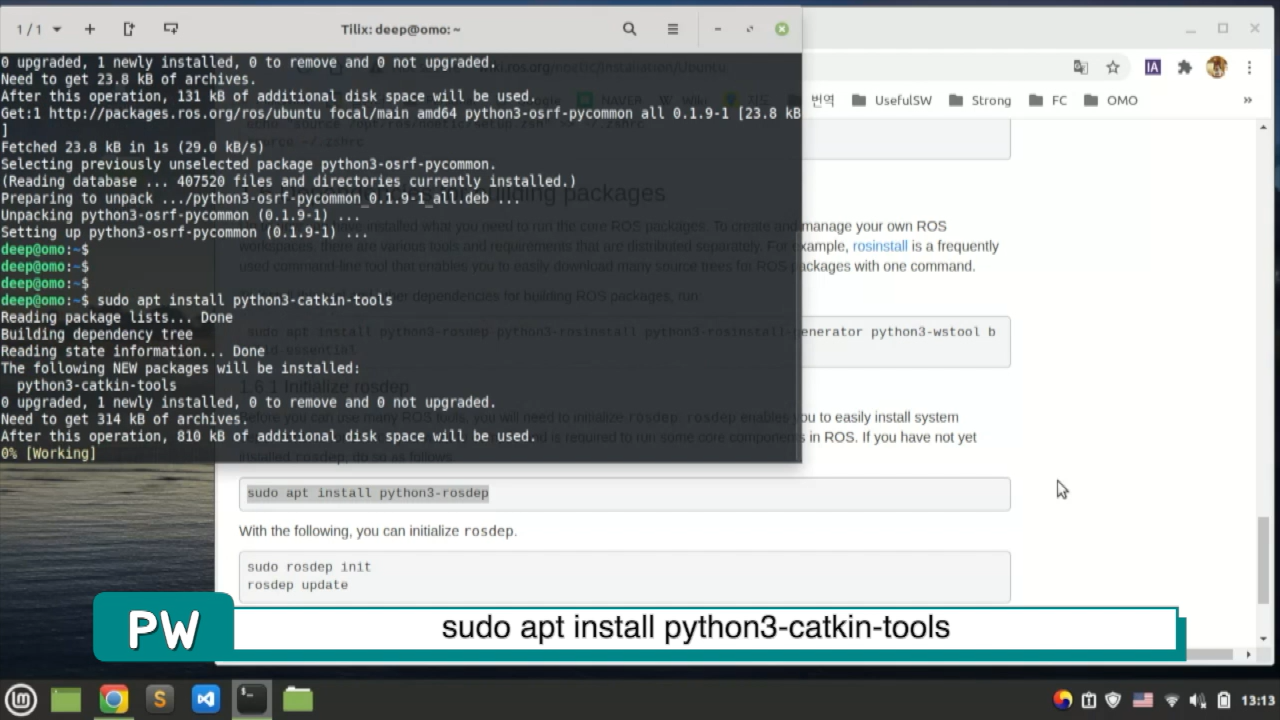
Sau đó, chỉ cần cài đặt python3-catkin-tools.
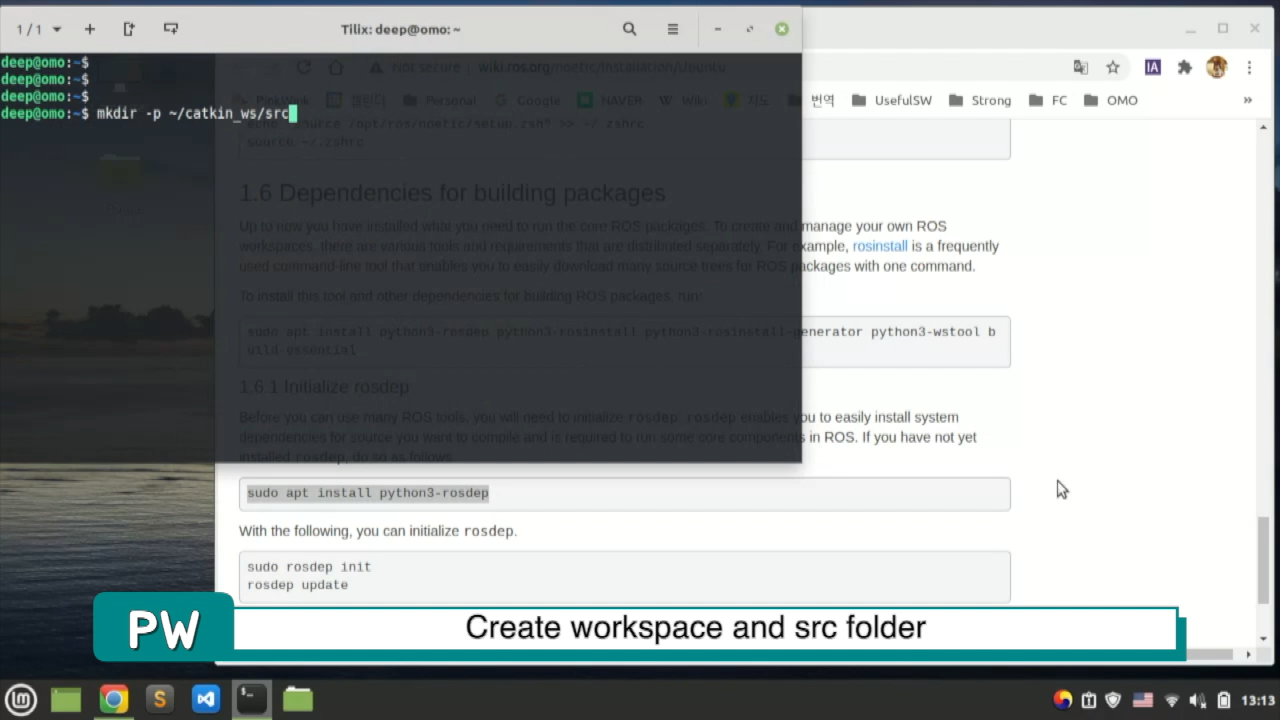
Bây giờ hãy tạo một không gian làm việc (catkin_ws) và một thư mục src trong đó.
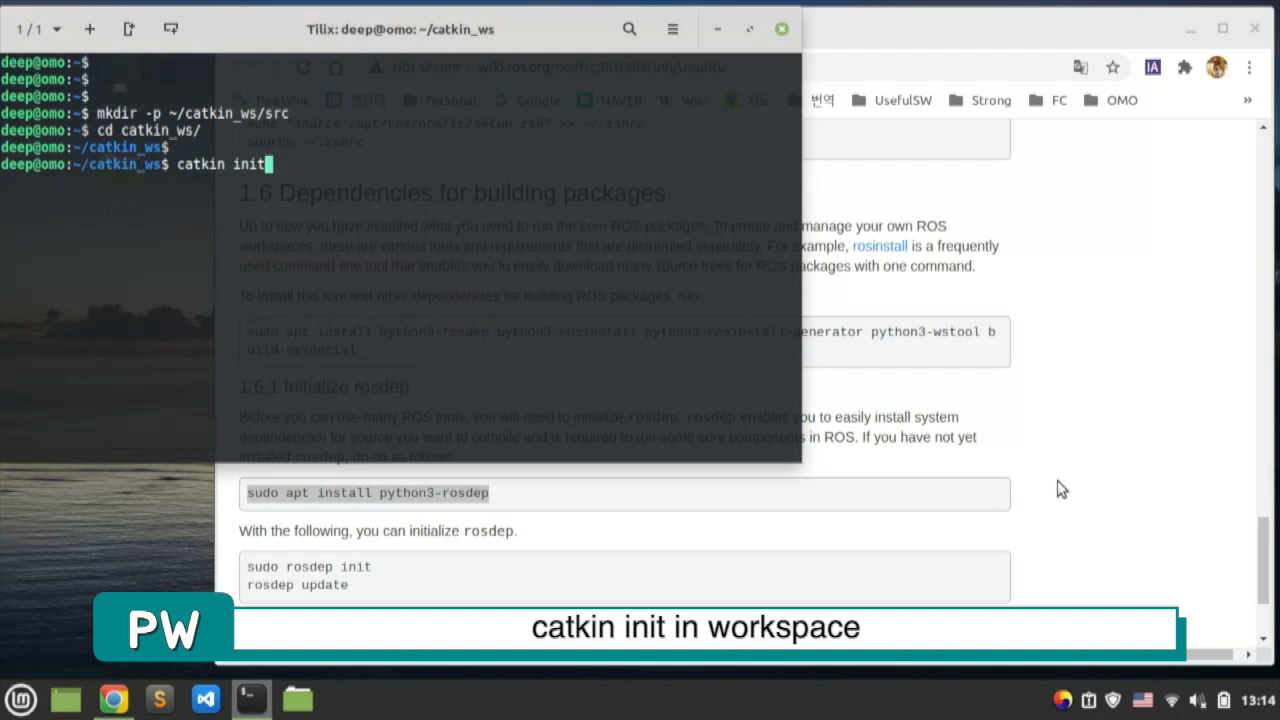
và chạy catkin init ở đó
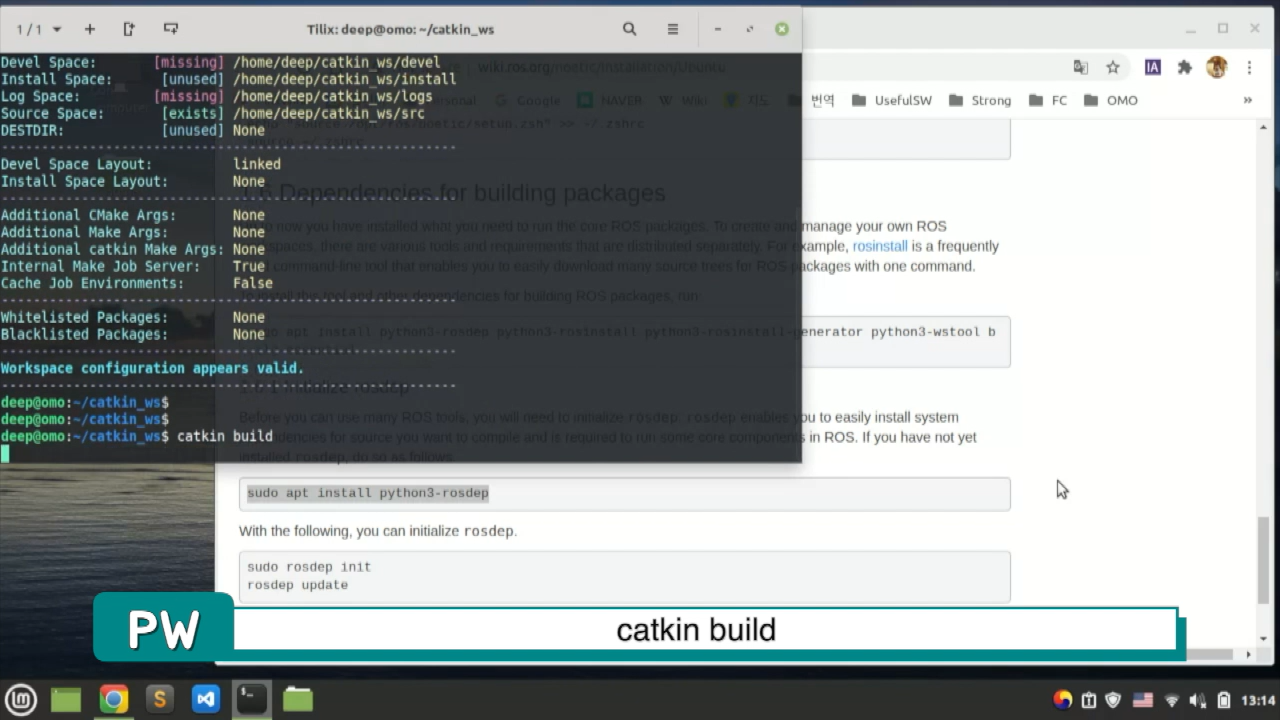
Làm một bản dựng catkin.
Và nếu bạn nhìn vào không gian làm việc, bạn có thể thấy thư mục build devel logs đã được tạo.
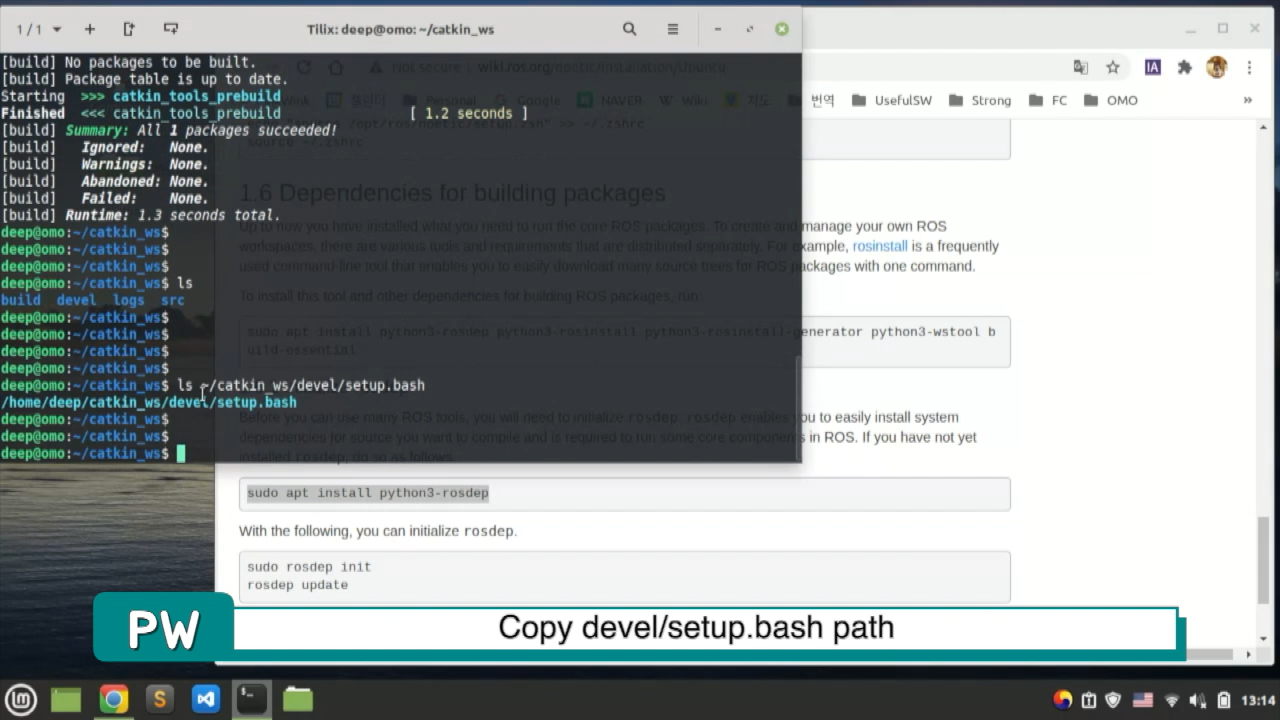
Sau khi kiểm tra đường dẫn setup.bash trong thư mục devel có...
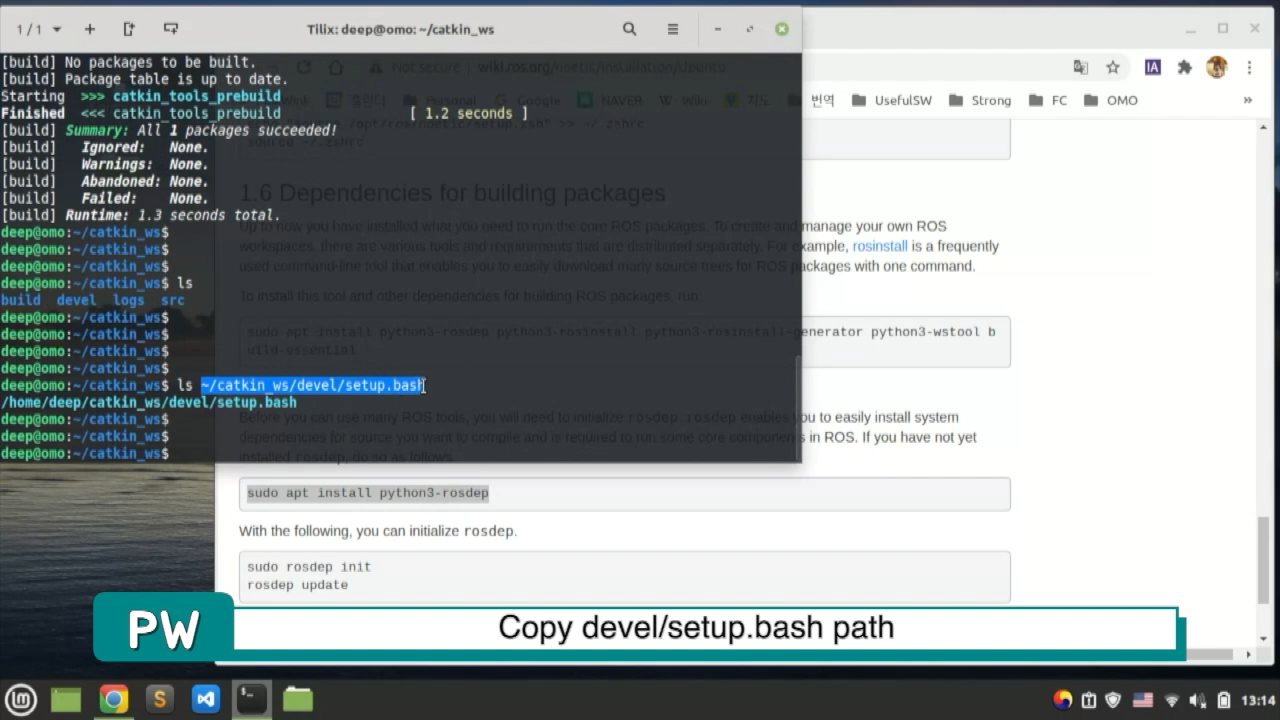
Sao chép đường dẫn
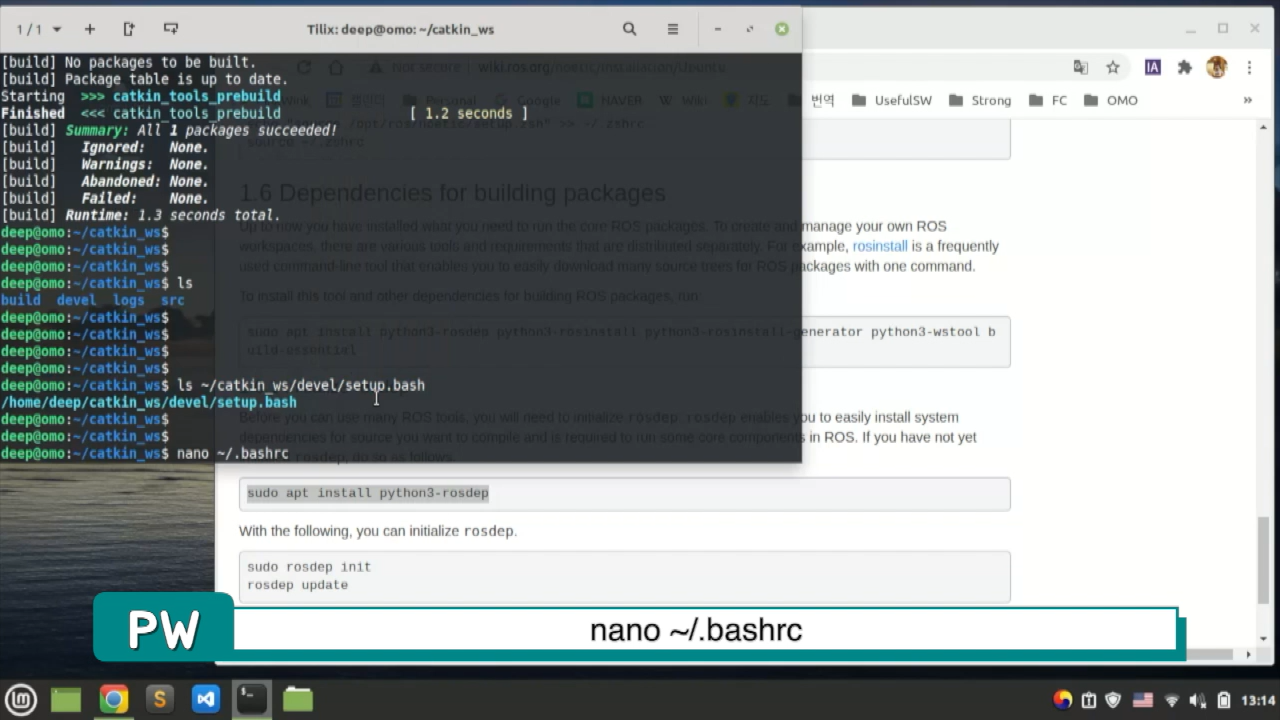
Chuyển đến bashrc bằng nano
Thêm nó vào bí danh có tên là noetic mà bạn đã tạo trước đó.
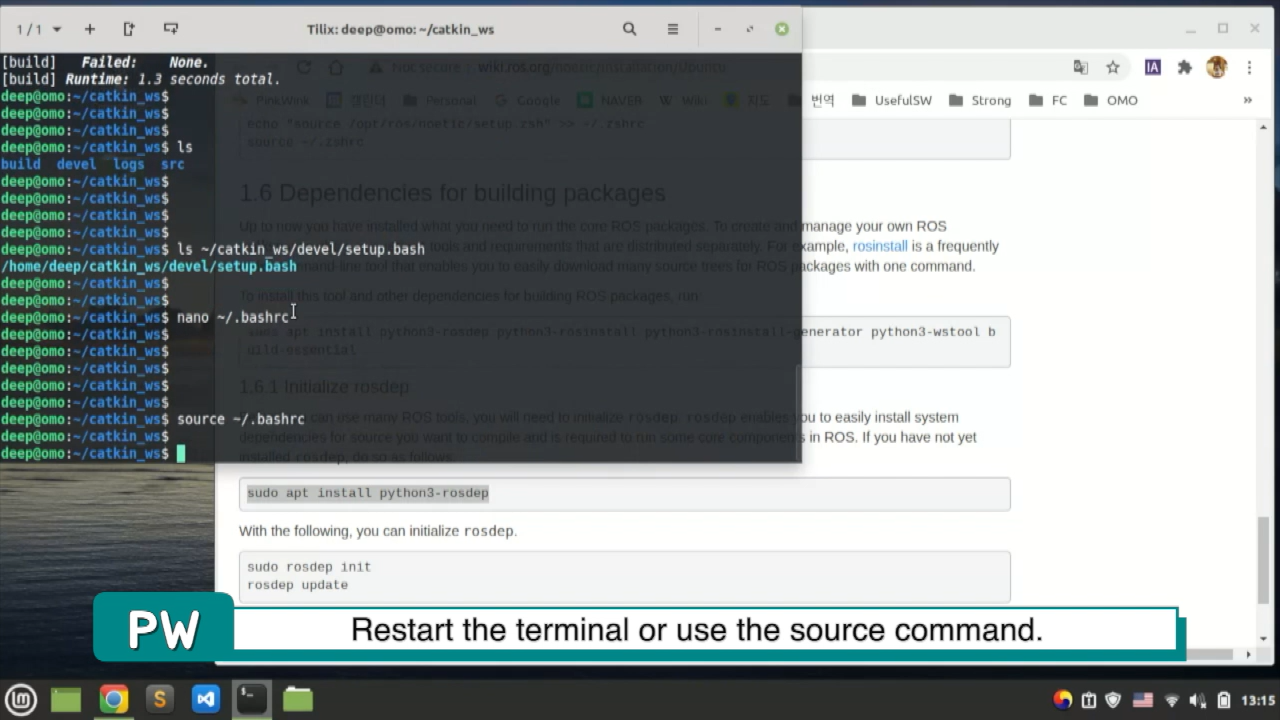
Gọi noetic bây giờ đọc cả đường dẫn cài đặt nhị phân và đường dẫn xây dựng nguồn. Bây giờ, hãy tắt thiết bị đầu cuối và bật lại.... Hãy cài đặt ROS2.
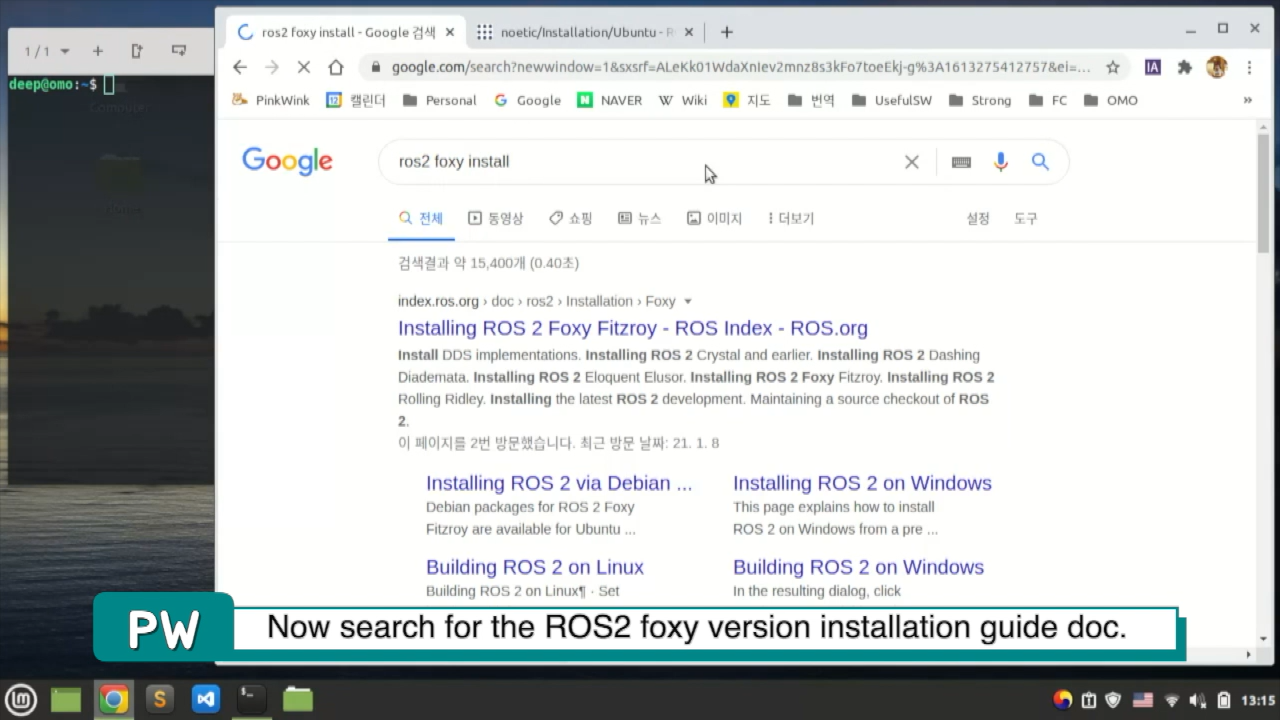
Đồng thời tìm tài liệu hướng dẫn cài đặt của ROS2 Foxy,

Và tìm trang hướng dẫn cài đặt nhị phân.
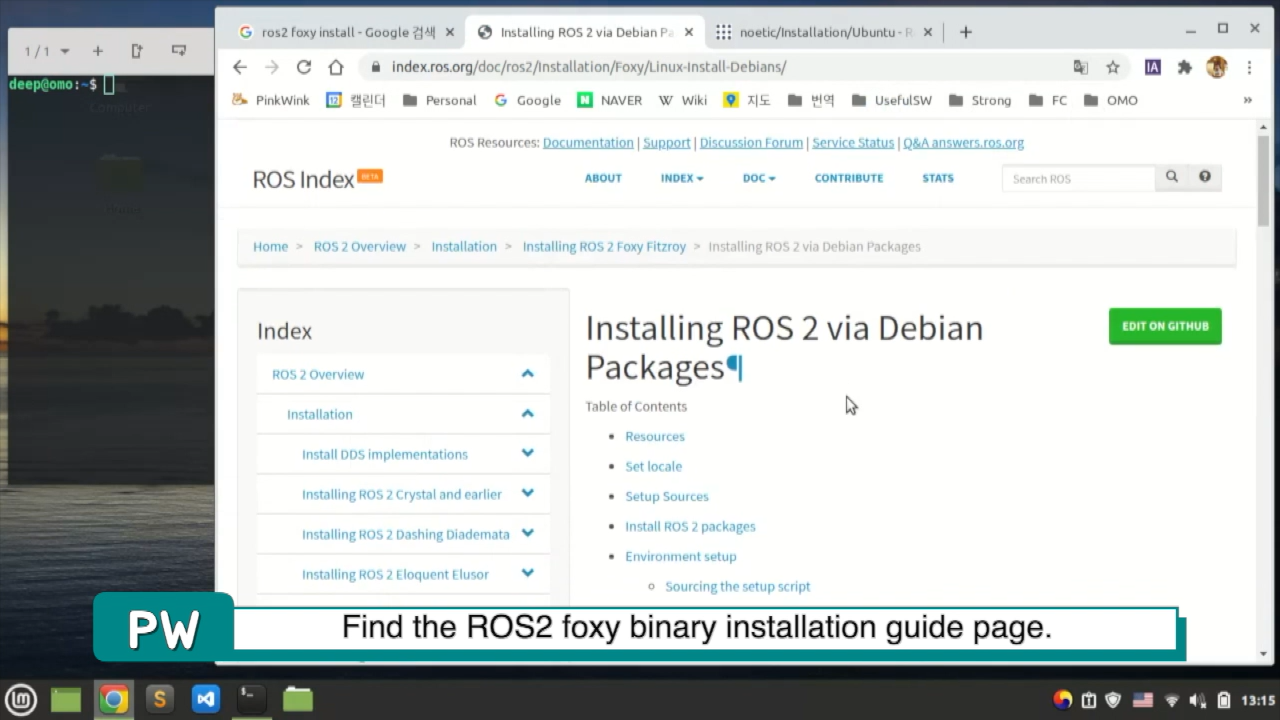
Bắt đầu nào.~
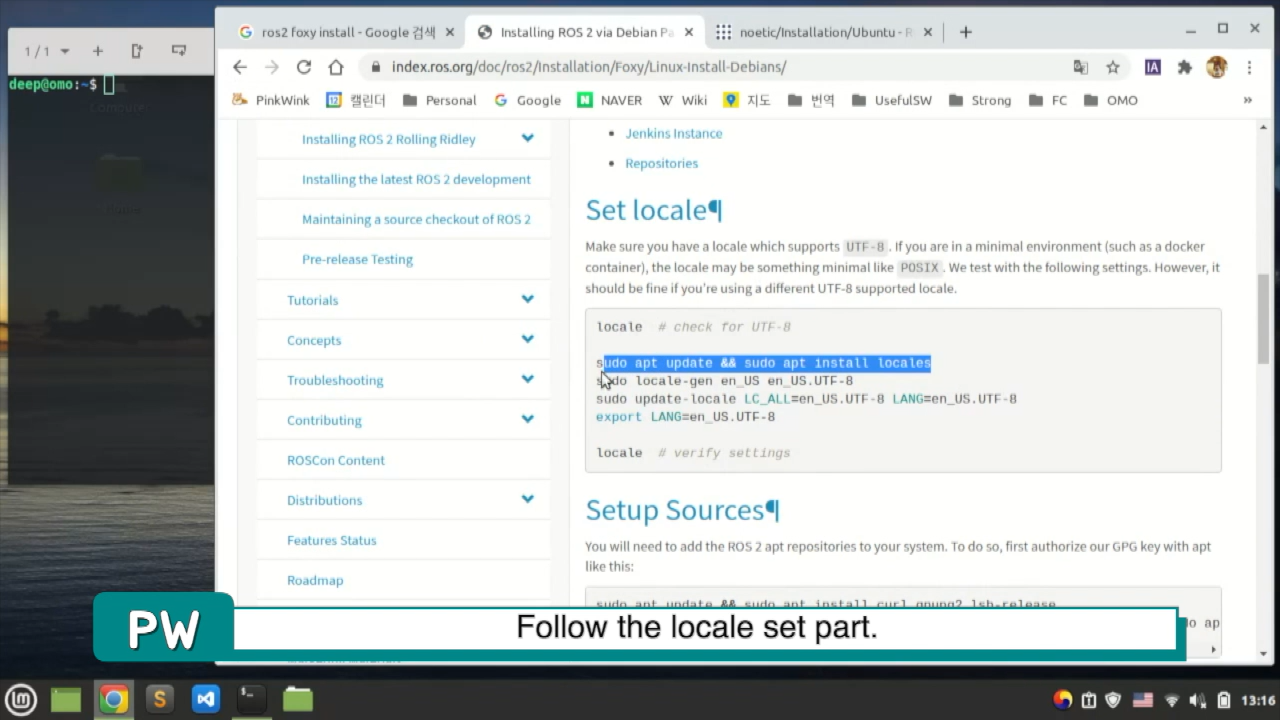
Đầu tiên, đặt ngôn ngữ.
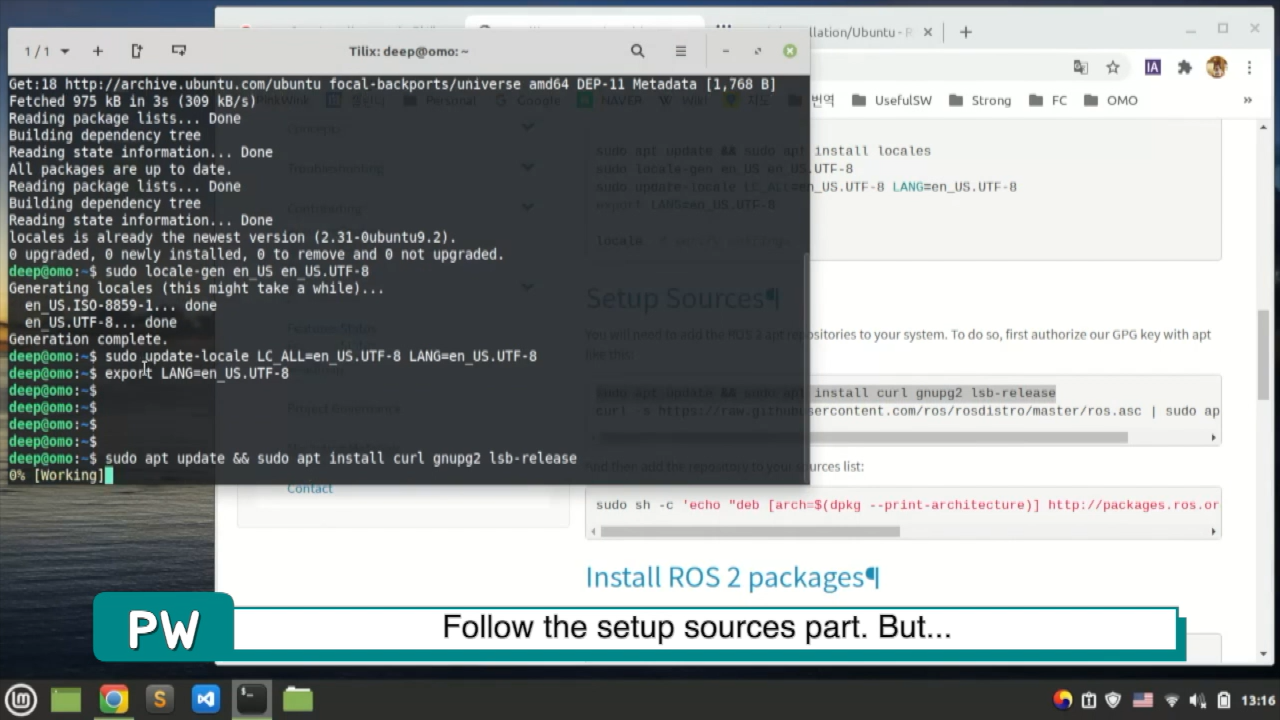
Theo dõi phần nguồn.
Sau khi tiến xa đến mức này~

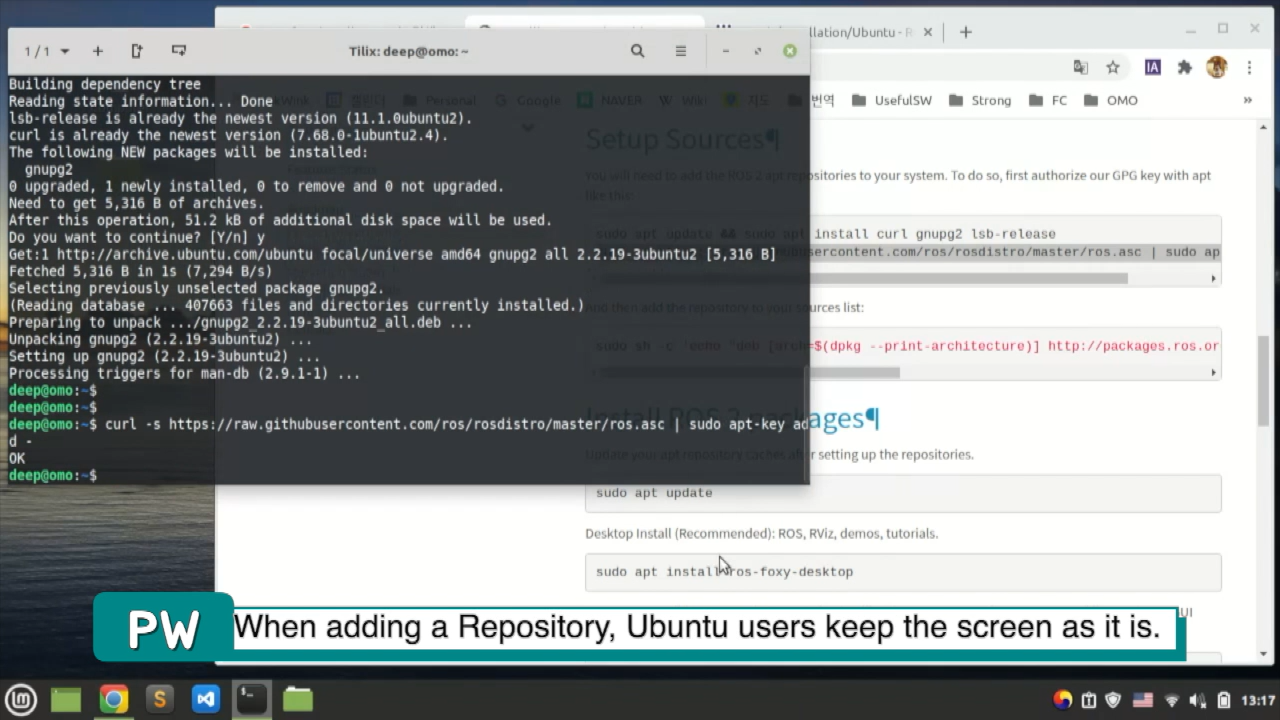
Khi chạy mã này, người dùng Ubuntu có thể chạy nó.
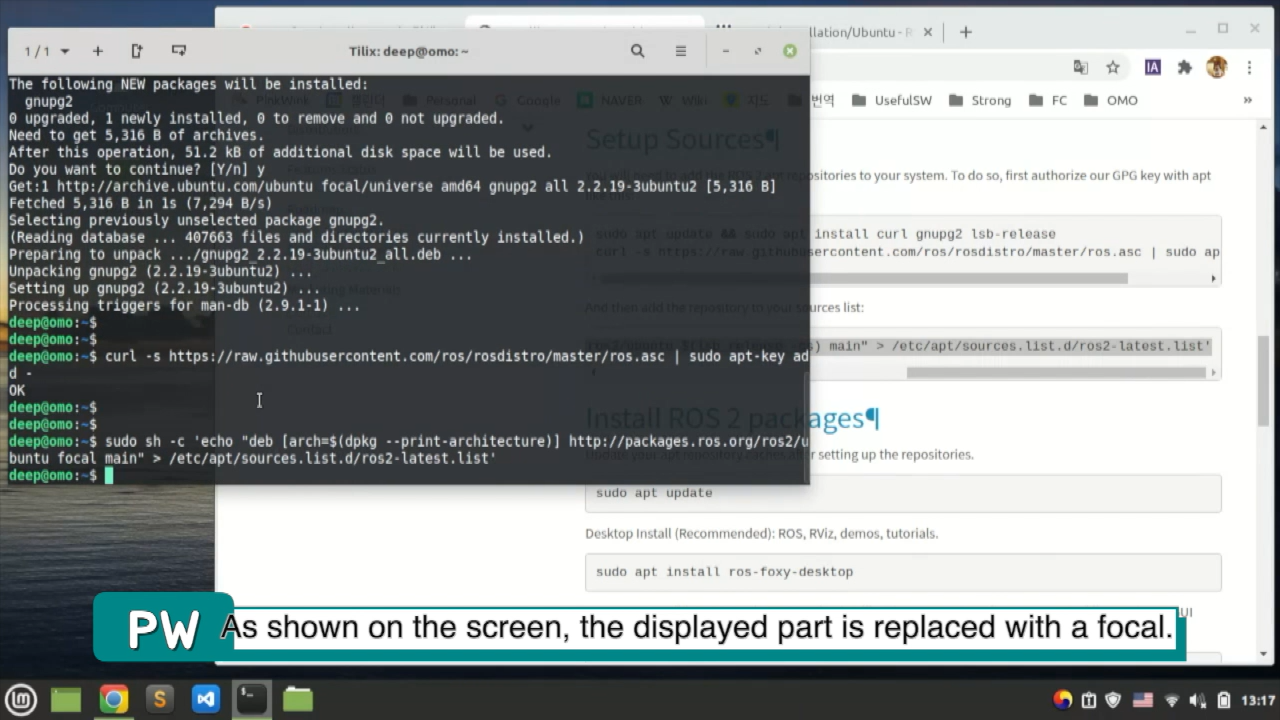
Những người dùng Mint như tôi thay đổi $(lsb_release -sc ) thành tiêu điểm như tôi vừa làm trong Noetic.

thực hiện cập nhật apt

Cài đặt máy tính để bàn ros-foxy.
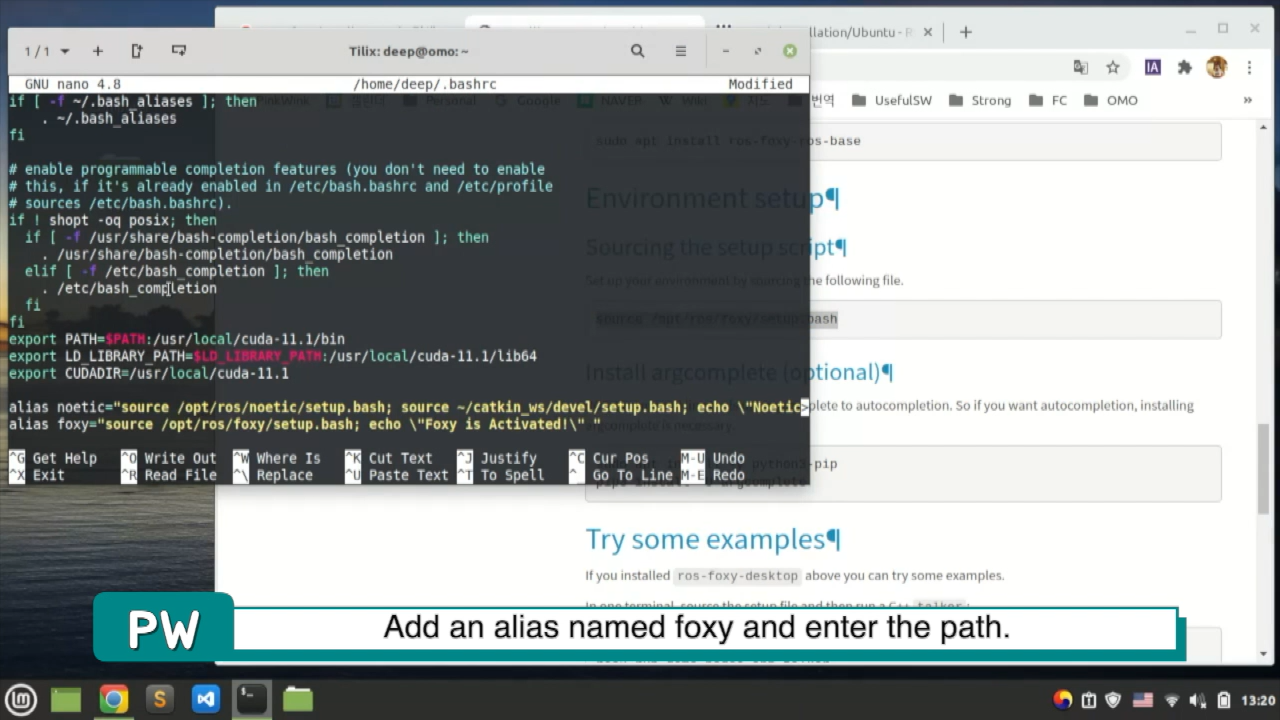
Và cũng giống như tôi đã tạo một bí danh gọi là noetic, tôi đã tạo một bí danh gọi là foxy.
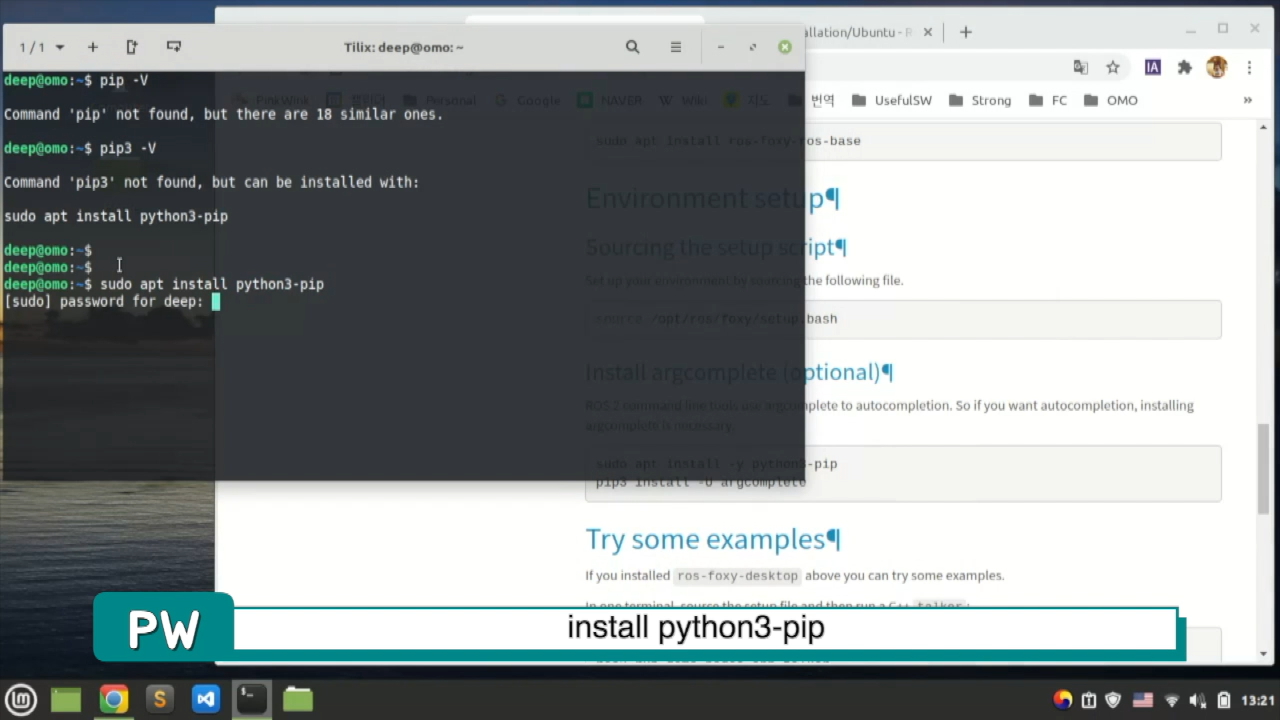
Cài đặt python3-pip và
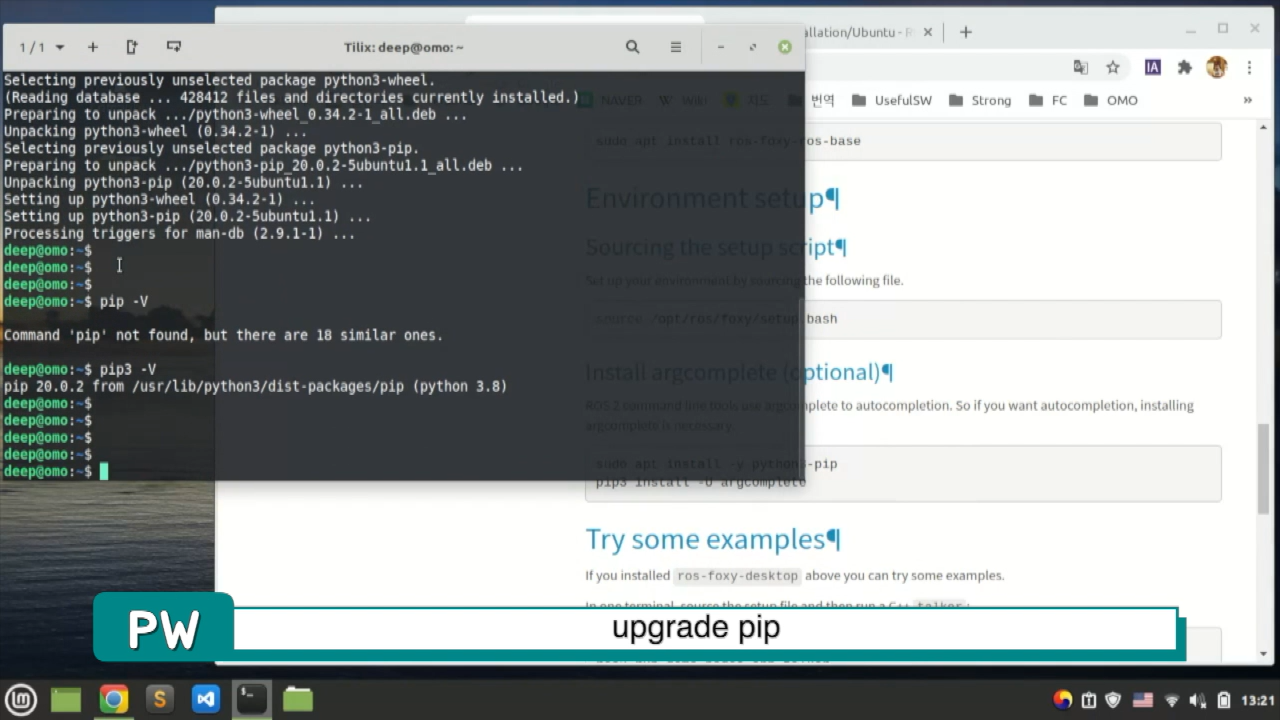
Ngoài ra nâng cấp.
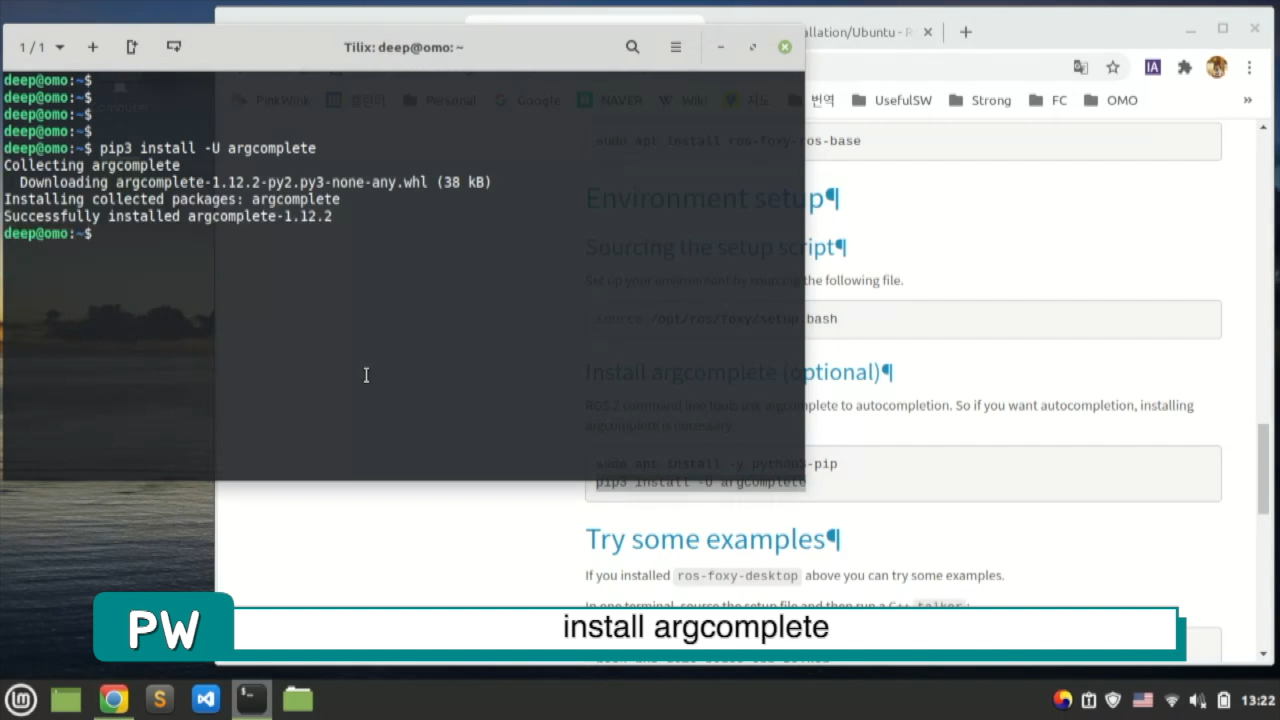
Nó cũng cài đặt argcomplete liên quan đến tự động hoàn thành.^^